

Large texture haptic representation system
A technology of tactile reproduction and large texture, applied in the direction of electrical digital data processing, input/output process of data processing, instruments, etc., can solve the problems affecting the authenticity of texture feeling, inability to simulate rigid contact, and small output force, etc., to achieve Enhance immersion, high bandwidth, and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below through specific embodiments.
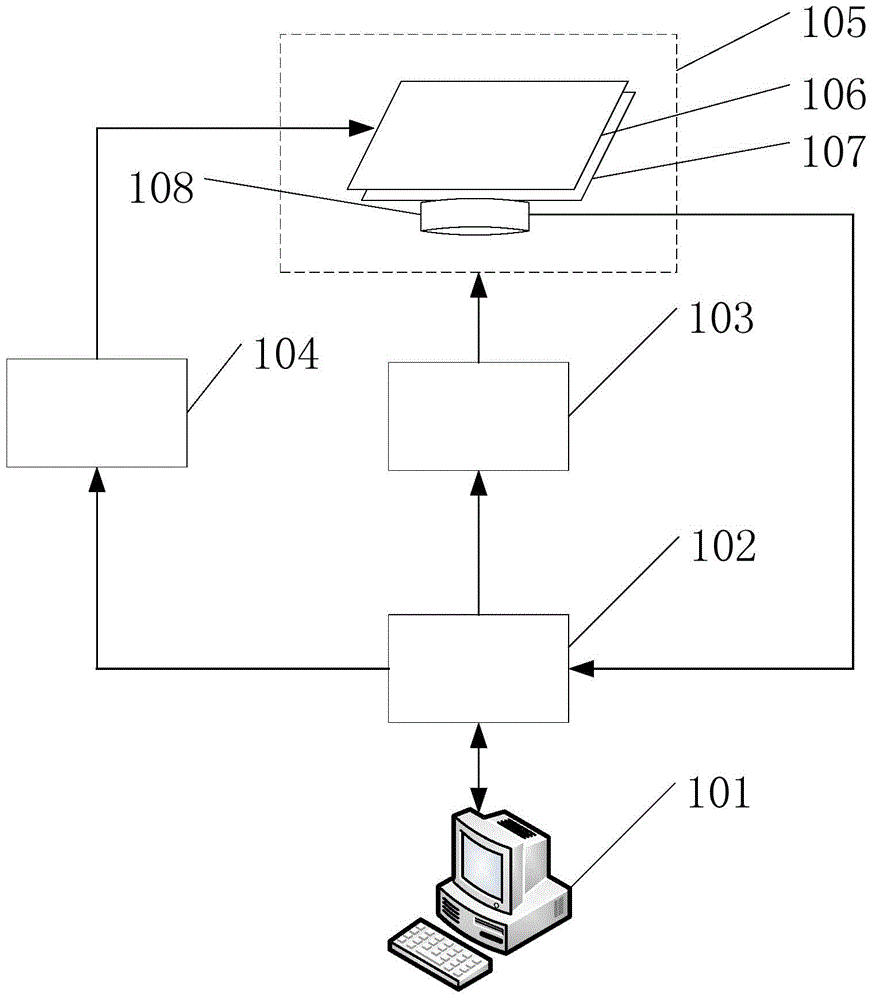
[0036] refer to figure 1 , a large-texture tactile reproduction system comprising
[0037] The interactive panel 106 has a vibrating device attached to the back of the interactive panel 106. The interactive panel 106 is made of copper-beryllium alloy. The vibrating device is a matrix of piezoelectric ceramic sheets 107, which together form an interactive panel for variable friction texture reproduction.
[0038] A finger positioning device, the finger positioning device is fixed at the bottom of the piezoelectric ceramic sheet matrix 107 to detect the force / torque information exerted by the finger on the interactive flat panel 106 . A six-degree-of-freedom force / torque sensor 108 and its controller are used, and the six-degree-of-freedom force / torque sensor 108 is fixed at the bottom center of the piezoelectric ceramic sheet matrix 107 through a connecting column 401 . The above-ment...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More