

Suspension control method of electromagnetic constant conduct low-speed magnetic-levitation train
A technology for maglev train and suspension control, which is applied in electric vehicles, electric traction, vehicle components, etc., can solve the problems of small range of suspension system parameters, poor stability, and difficulty in effectively taking into account tracking performance and robust performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
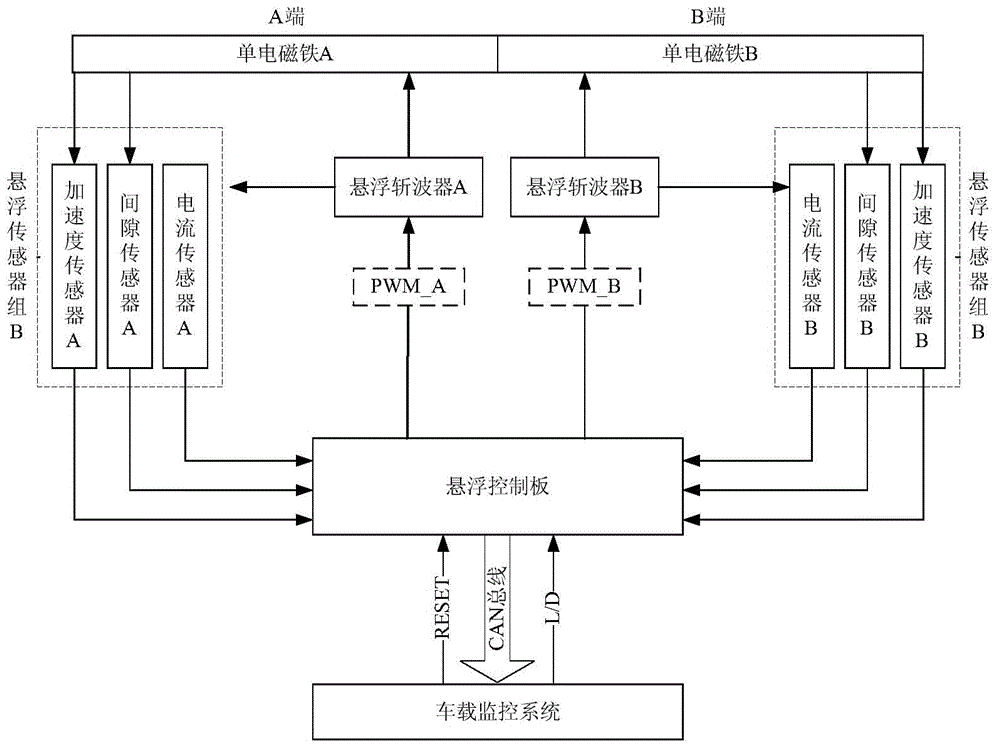
[0053] like Figure 4 As shown, the steps of the suspension control method of the electromagnetic type constant conduction low-speed maglev train in this embodiment include:
[0054] 1) Obtain the current suspension gap, current speed and current virtual magnetic flux of each suspension module A and B of each suspension module of the electromagnetic constant conduction low-speed maglev train respectively;
[0055] 2) Take the current levitation gap and current speed of the levitation module A-end and B-end respectively as the outer loop feedback value, and calculate the expected virtual magnetic flux of the levitation module A-end and B-end in combination with the set levitation gap; The current virtual magnetic flux at the terminal is used as the inner loop feedback value, combined with the expected virtual magnetic flux at the A terminal and B terminal of the suspension module, the control signal of the A terminal and the B terminal of the suspension module is calculated, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More