

Deep-sea manned submersible foot-type motion control device
A technology for motion control devices and manned submersibles, applied in transportation and packaging, underwater operation equipment, ships, etc., can solve the problems of heavy load on hands, low efficiency, cumbersome operation, etc., and achieve weight reduction, easy operation and use , the effect of simplifying the shaft system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The specific implementation manner of the present invention will be described below in conjunction with the accompanying drawings.
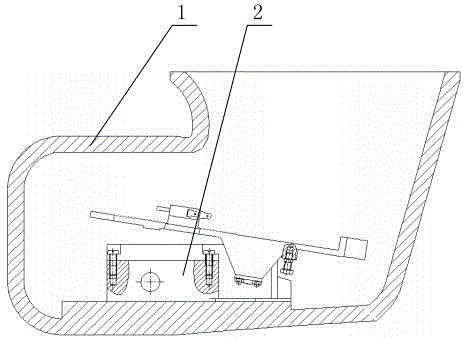
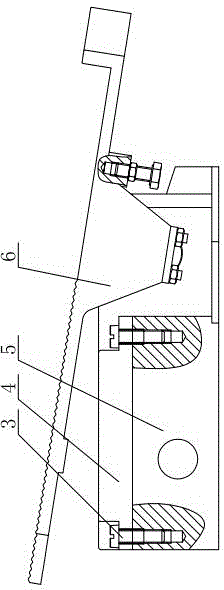
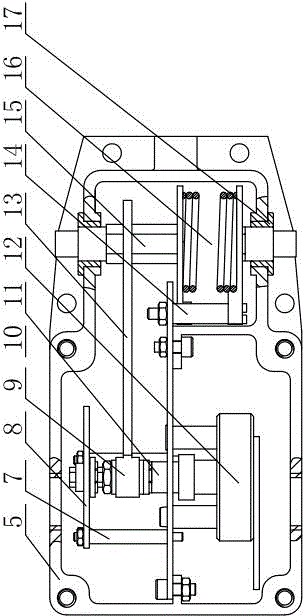
[0030] Such as figure 1 , figure 2 and image 3As shown, the deep-sea manned submersible foot motion control device of the present embodiment includes a foot boot 1, and a foot controller 2 is installed inside the foot boot 1. The structure of the foot controller 2 is: including a sealed box body 5, sealed The top of the box body 5 is installed with the top cover 4 through the slotted cylindrical head screw 3, and an intermittent gear transmission mechanism and a spring self-resetting mechanism 16 are installed inside the sealed box body 5; the structure of the intermittent gear transmission mechanism is: The mounting plate 10 in the middle is fixed with a rotary potentiometer 12 at the front end of the mounting plate 10. The output end of the rotary potentiometer 12 is installed with a potentiometer shaft 11 through a coupling. The pi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More