

Human lower extremity exoskeleton walking aid rehabilitation robot
A technology of rehabilitation robot and exoskeleton, which is applied in the direction of equipment to help people walk, equipment for passive exercise, physical therapy, etc. It can solve the problems that cannot be used to help patients walk, cannot be used for patient rehabilitation training, and cannot be used for patients to walk, etc. Achieve light structure, reduce impact, enhance comfort and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
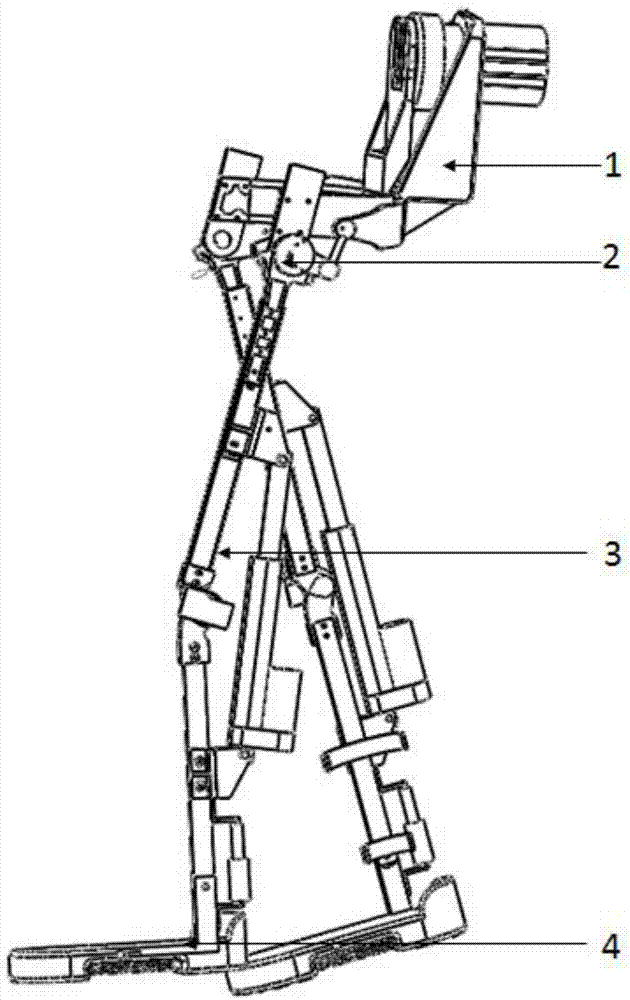
[0020] Such as figure 1 As shown, the present embodiment includes: waist back movement and support frame module 1, hip joint movement module 2, knee joint movement module 3, ankle joint movement module 4, wherein: knee joint movement module 3 two ends respectively and hip joint movement Module 2 is connected to the ankle joint movement module 4, the waist back movement and support frame module 1 is connected to the hip joint movement module 2, and the crutch module is independent of the exoskeleton robot body.
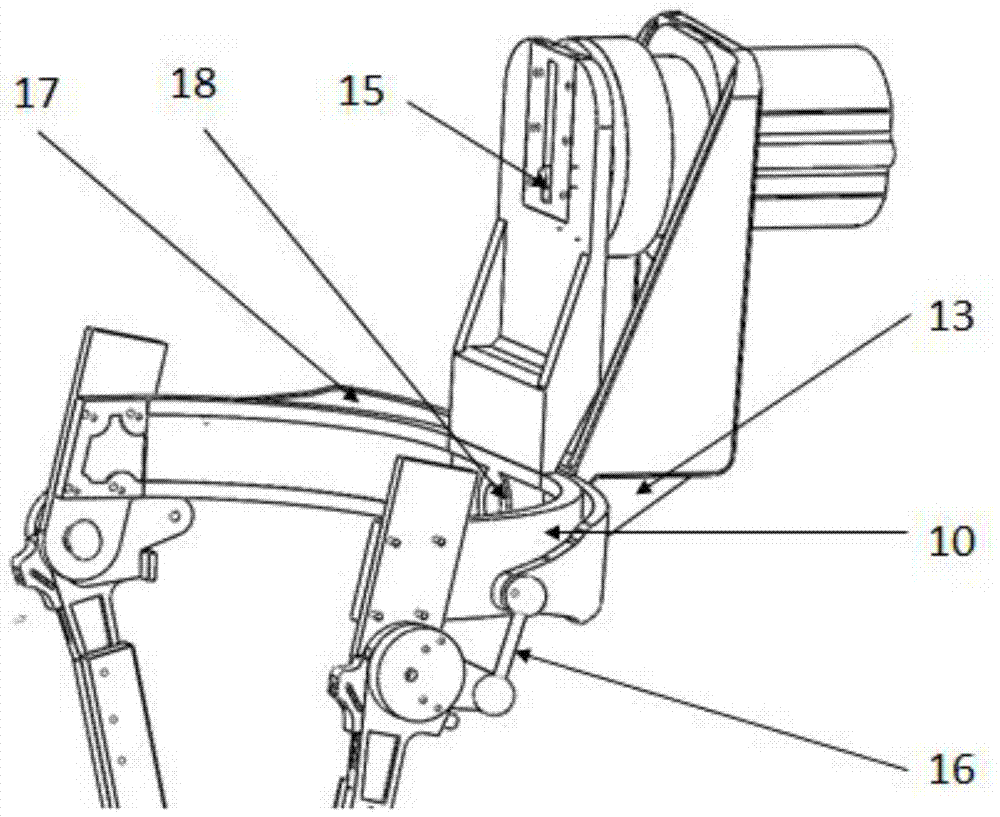
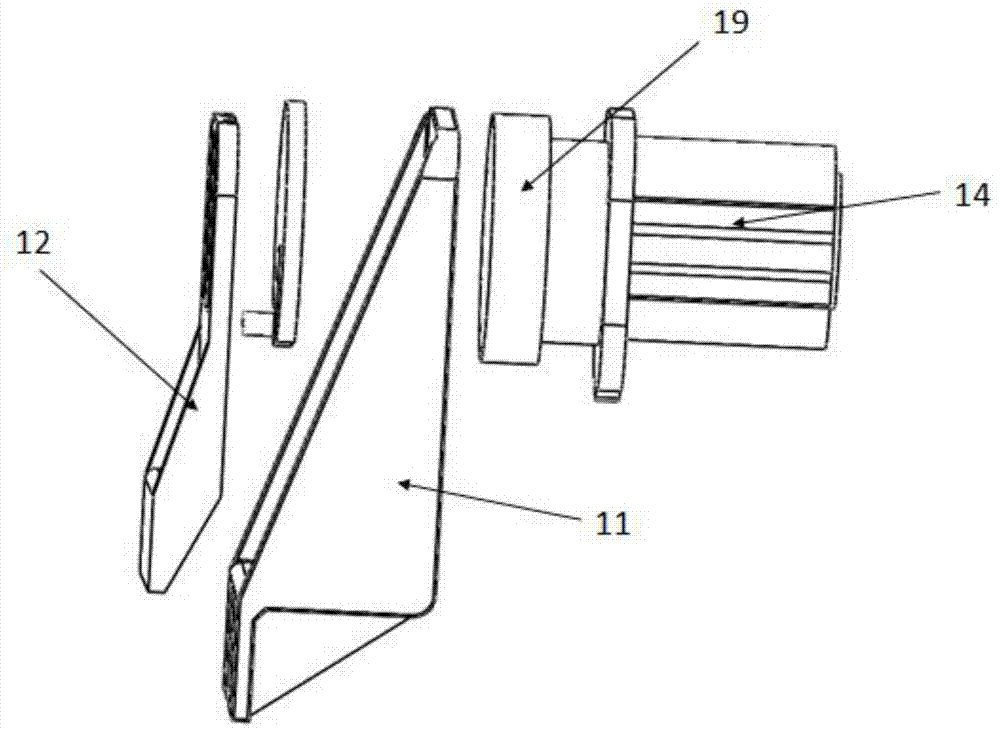
[0021] Such as figure 2 , 3As shown, the waist and back movement module and the support frame module 1 include: a waist support 10, a support support plate 11, a support vertical plate 12, a support bottom plate 13, a servo motor 14, a crank slider mechanism 15, and a space four-link Mechanism 16, back rocker 17 and positioning bolt 18, wherein: the rocker 17 of the back crank slider mechanism 15 is fixed, the servo motor 14 drives the crank to rotate, and drives th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More