

A three-probe robot nano-manipulation system and method
A nano-manipulation and robot technology, applied in the field of robot nano-manipulation systems, can solve the problem that the shape factor of the manipulated object is greatly affected
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
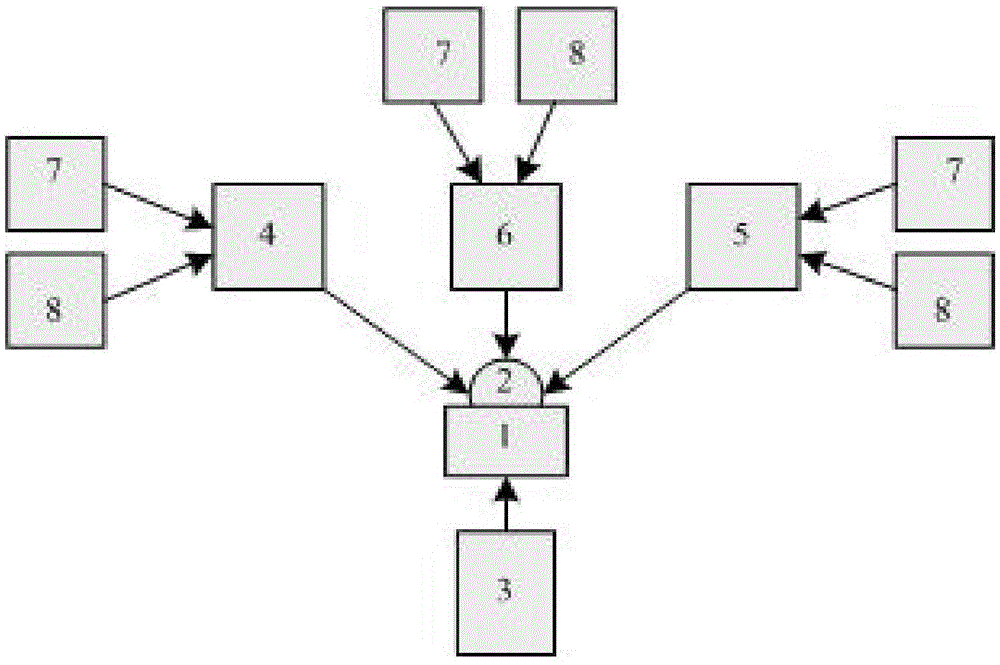
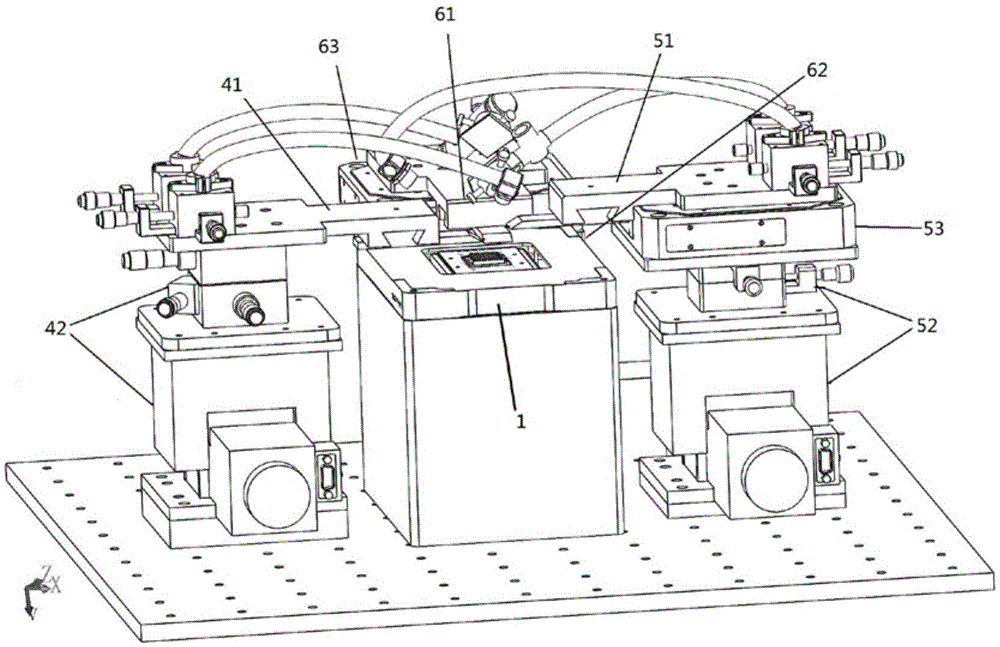
[0018] like figure 1 , 2 As shown, the nano-manipulation system of the three-probe robot of the present invention mainly includes: a scanner control module 1, an inverted or upright optical microscope 3, a first probe control module 4, a second probe control module 5 and a third probe control module6. The measured object 2 is placed on the scanner control module 1, the first probe control module 4 and the second probe control module 5 are respectively placed on both sides of the inverted or upright optical microscope 3, and the first probe control module 4 It is placed at an angle of 90°-180° with the second probe control module 5, and the third probe module 6 is placed on the mid-perpendicular line of the first probe module and the second probe module, and the first probe module is controlled by the computer respectively. The needle control module 4 , the second probe control module 5 and the third probe module 6 act and operate.
[0019] First, the scanned area of the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More