

Foot wheel type auto-kinetic movement platform based on parallel-connection six-freedom-degree movement mechanism
A technology of autonomous movement and movement mechanism, which is applied in the field of robots, can solve the problems of poor carrying capacity and achieve the effects of strong carrying capacity, flexible movement process, and increased steering resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
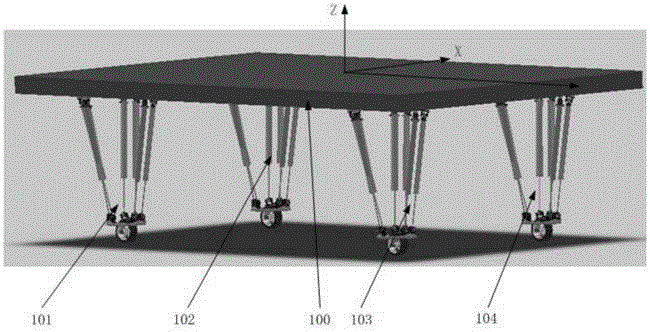
[0039] Such as figure 1 As shown, it is a pure electric drive, with four driving mechanisms of the caster-type motion platform. Its specific configuration is that the driving mechanisms 101 to 104 are installed under the platform carrier 100 . The flat carrier 100 is a cuboid structure, and the center of the platform carrier 100 is defined as the coordinate origin, along the length direction is the Y axis, the width direction is the Z axis, and the height direction is the Z axis. The positive direction of each coordinate axis is as follows: figure 1 regulations shown. The drive mechanisms 101 to 104 are distributed symmetrically with respect to the X axis and the Y axis.
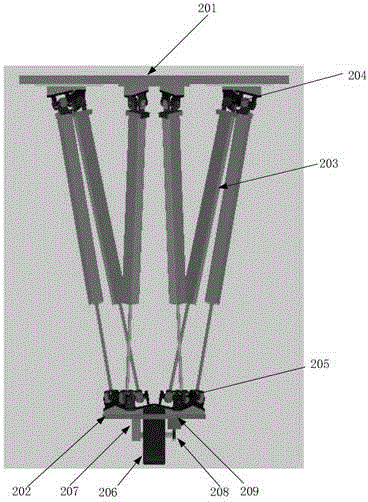
[0040] Such as figure 2 The structure of one of the drive mechanisms is shown. Among them, the six actuators of the six-degree-of-freedom motion mechanism are electric cylinders, and their structures and connection methods are exactly the same. Taking one of them as an example, the shell of the electric...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More