

Arc-shaped movement-track algorithm for palletizing robot
A palletizing robot and arc-shaped motion technology, applied in the field of palletizing robots, can solve the problems of insufficient flexibility, slow time-consuming, etc., and achieve the effect of reducing movement time, movement distance, and power usage cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the accompanying drawings of the description.
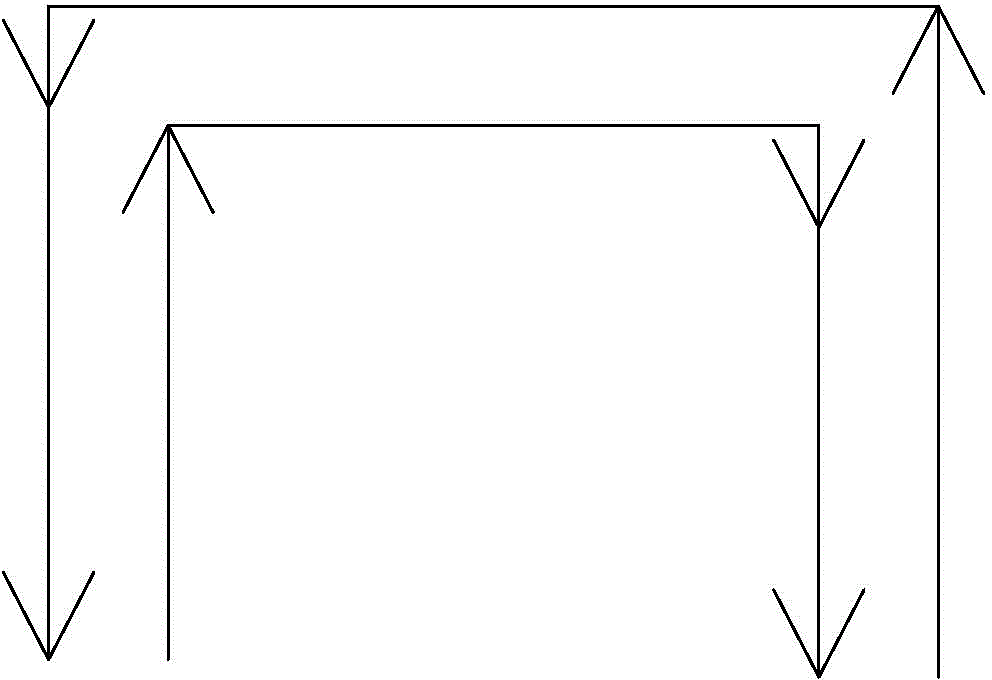
[0028] Such as figure 2 , 3 As shown, a palletizing robot arc motion trajectory algorithm, the palletizing robot is a parallel rod palletizing robot, the algorithm includes the following steps:
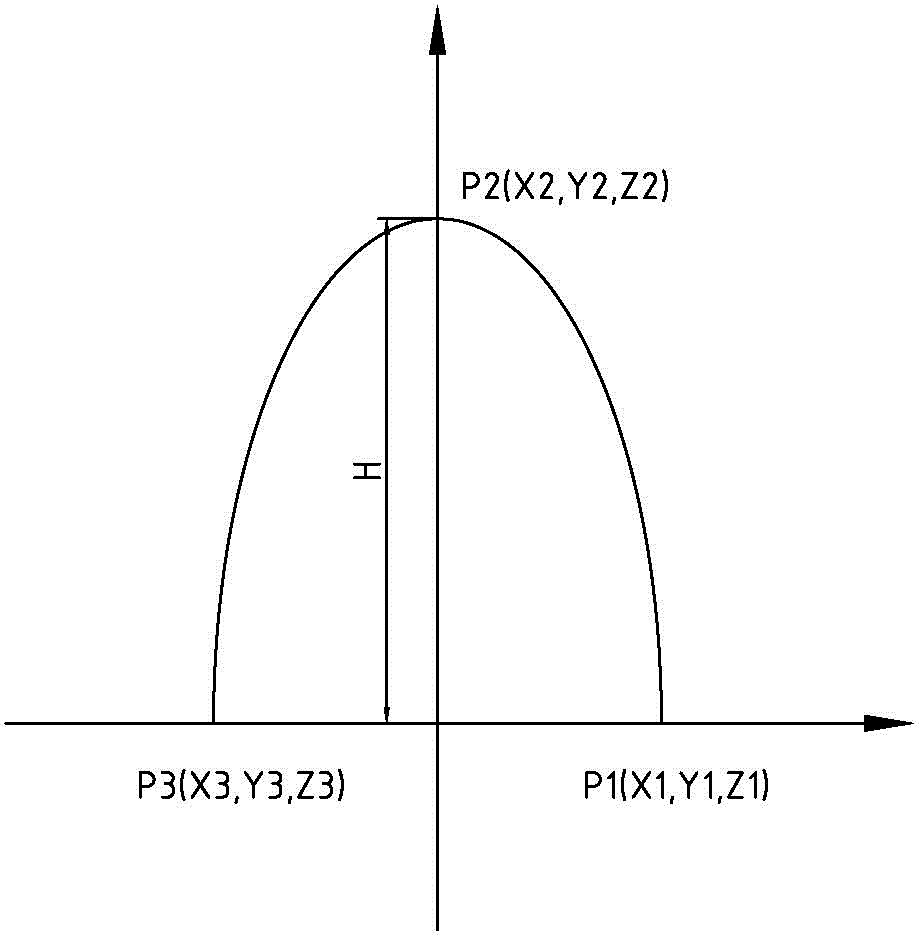
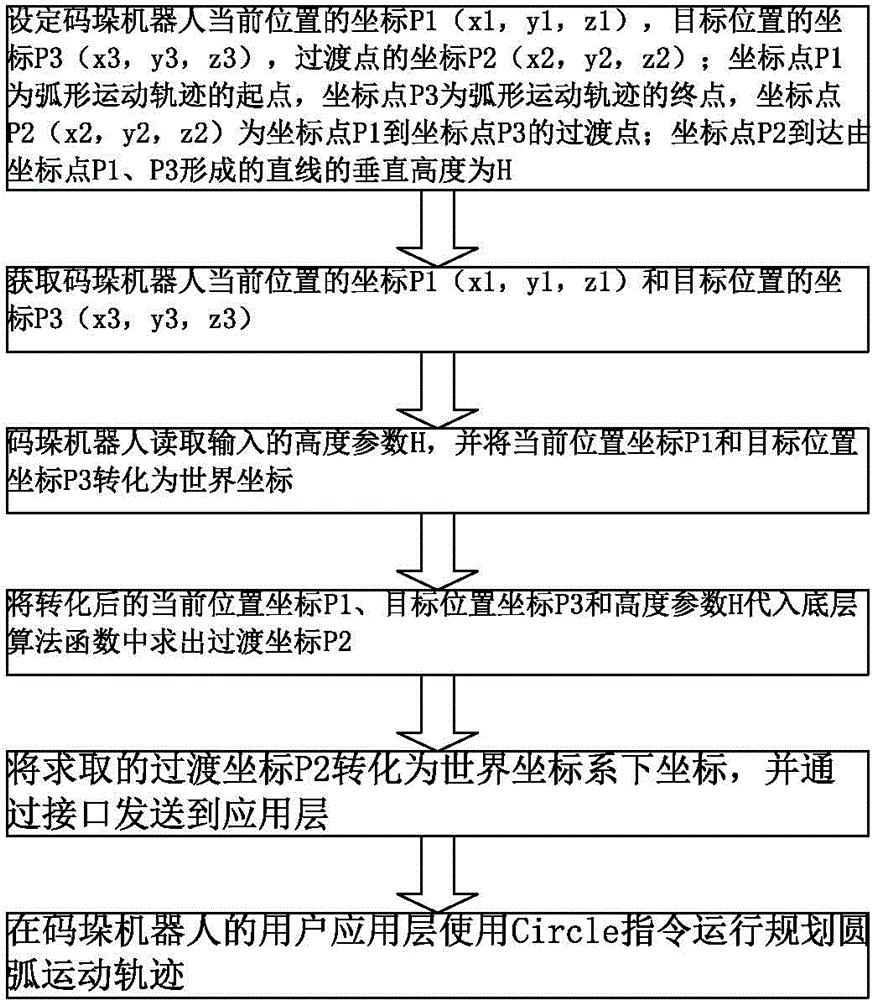
[0029] (1) Set the coordinates P1 (x1, y1, z1) of the current position of the palletizing robot, the coordinates P3 (x3, y3, z3) of the target position, and the coordinates P2 (x2, y2, z2) of the transition point; the coordinate point P1 is the starting point of the arc-shaped trajectory, the coordinate point P3 is the end point of the arc-shaped trajectory, and the coordinate point P2 (x2, y2, z2) is the transition point from the coordinate point P1 to the coordinate point P3; the coordinate point P2 arrives from the coordinate point P1, The vertical height of the straight line formed by P3 is H;
[0030] (2) Obtain the coordinates P1 (x1, y1, z1) of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More