

Flexible clamp for numerical control machining of large-scale thin-wall workpiece and clamping force servo control method thereof
A technology of large thin-walled parts and flexible fixtures, applied in manufacturing tools, servo motors, metal processing equipment, etc., can solve the problems of difficult to control clamping force, affecting machining accuracy, large clamping force of workpieces, etc., to avoid machining accuracy. , the effect of simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
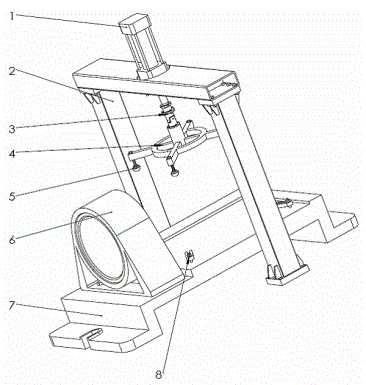
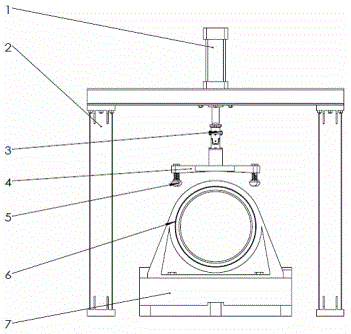
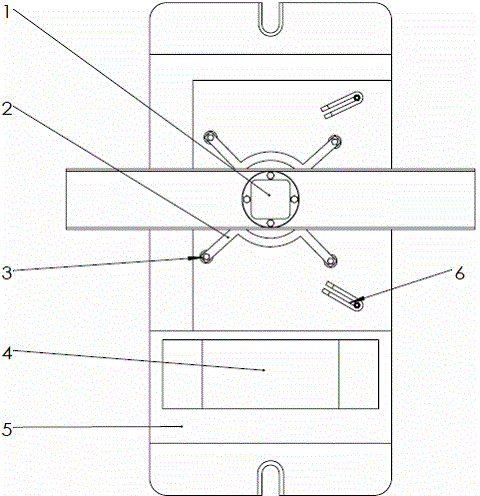
[0020] Refer to the attached figure 1 to attach Figure 5 The present invention will be described in detail below.
[0021] A flexible fixture for CNC machining of large thin-walled parts, including a servo hydraulic cylinder 1, a stand 2, a pressure plate 3, a pressure head 4, a boring guide device 5, a clamp body 6, and a positioning and pressing mechanism 7, and is characterized in that , the clamp body 6 is fixedly installed on the machine tool table, the stand 2 is arranged in the middle of the clamp body 6 and fixedly installed on the machine tool workbench, the servo hydraulic cylinder 1 is installed on the upper end of the stand 2, and the servo The piston rod of the hydraulic cylinder 1 runs through the stand 2 and is connected with the pressure plate 3, the pressure head 4 is installed on the pressure plate 3, the boring guide device 5 is installed at the front end of the clamp body 6, and the positioning and pressing There are several mechanisms 7 arranged on the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More