

Shape-controllable underwater biomimetic propulsion device
A propulsion device and bionic technology, applied in the field of intelligent robots, can solve the problems of difficult propulsion performance and maneuverability, low adaptability, fixation, etc., and achieve the effect of enhancing maneuverability and propulsion performance, and improving environmental adaptability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
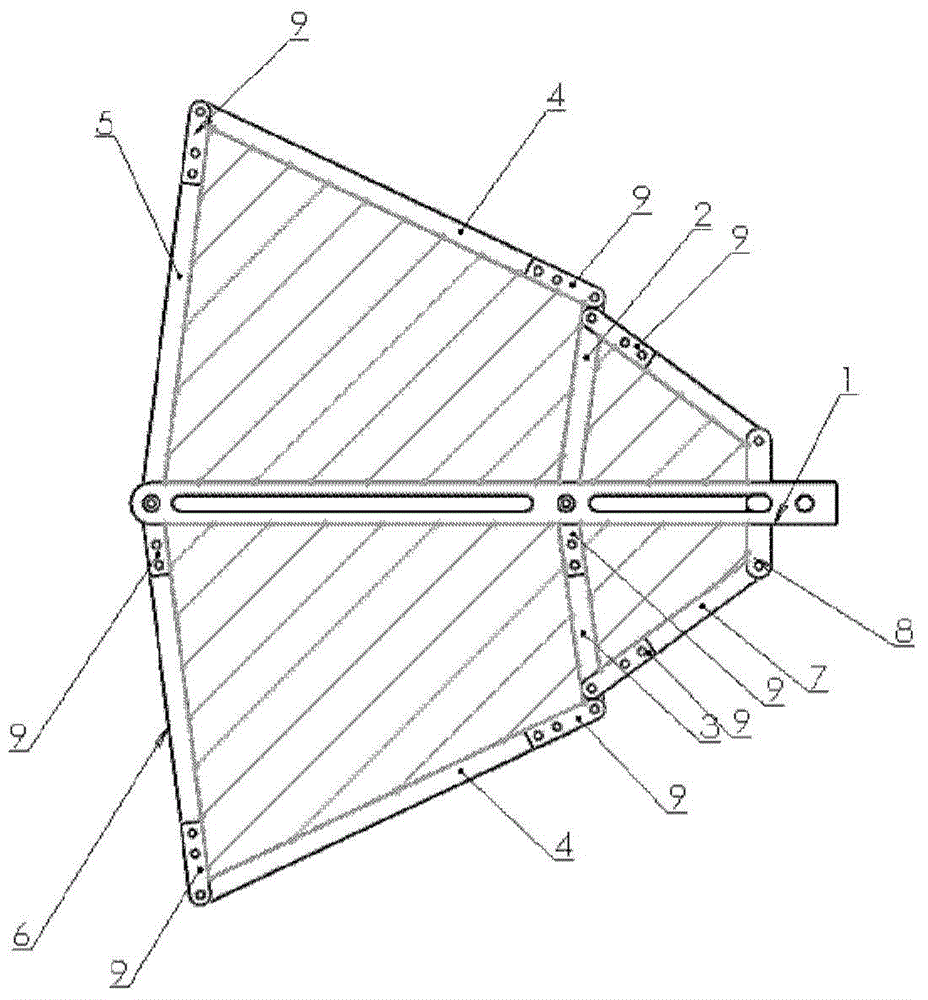
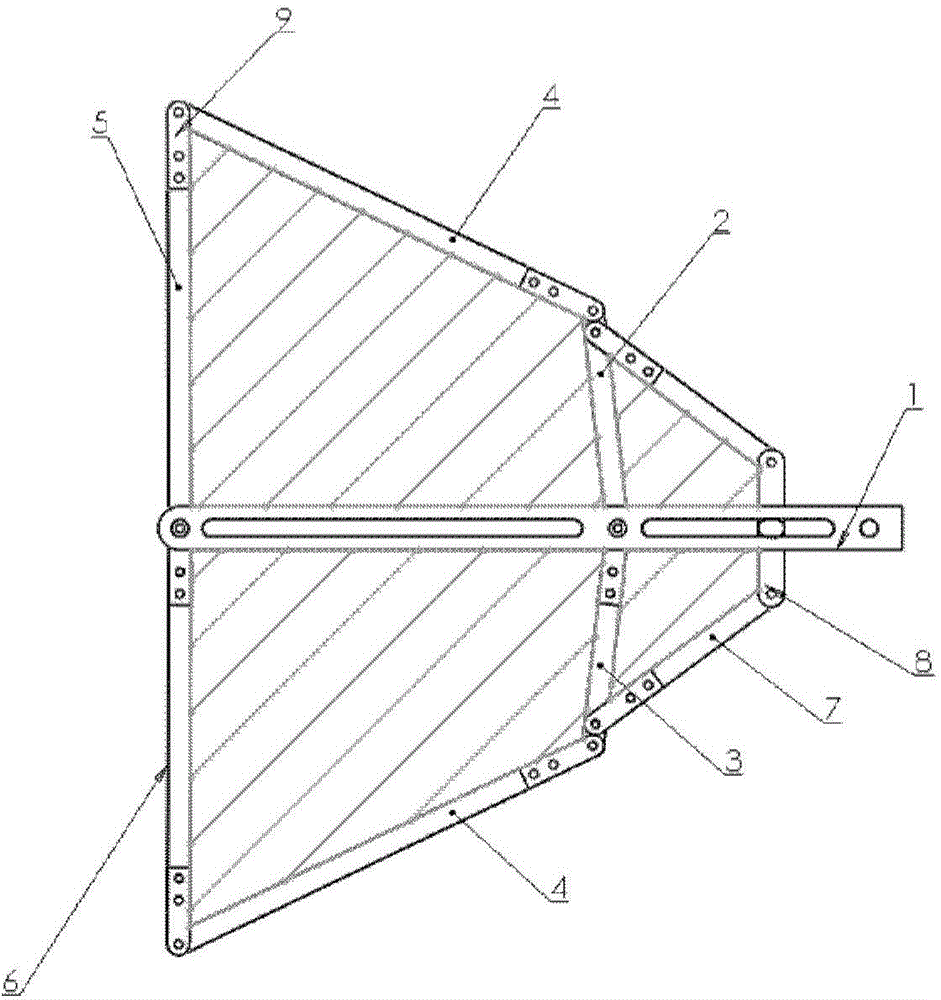
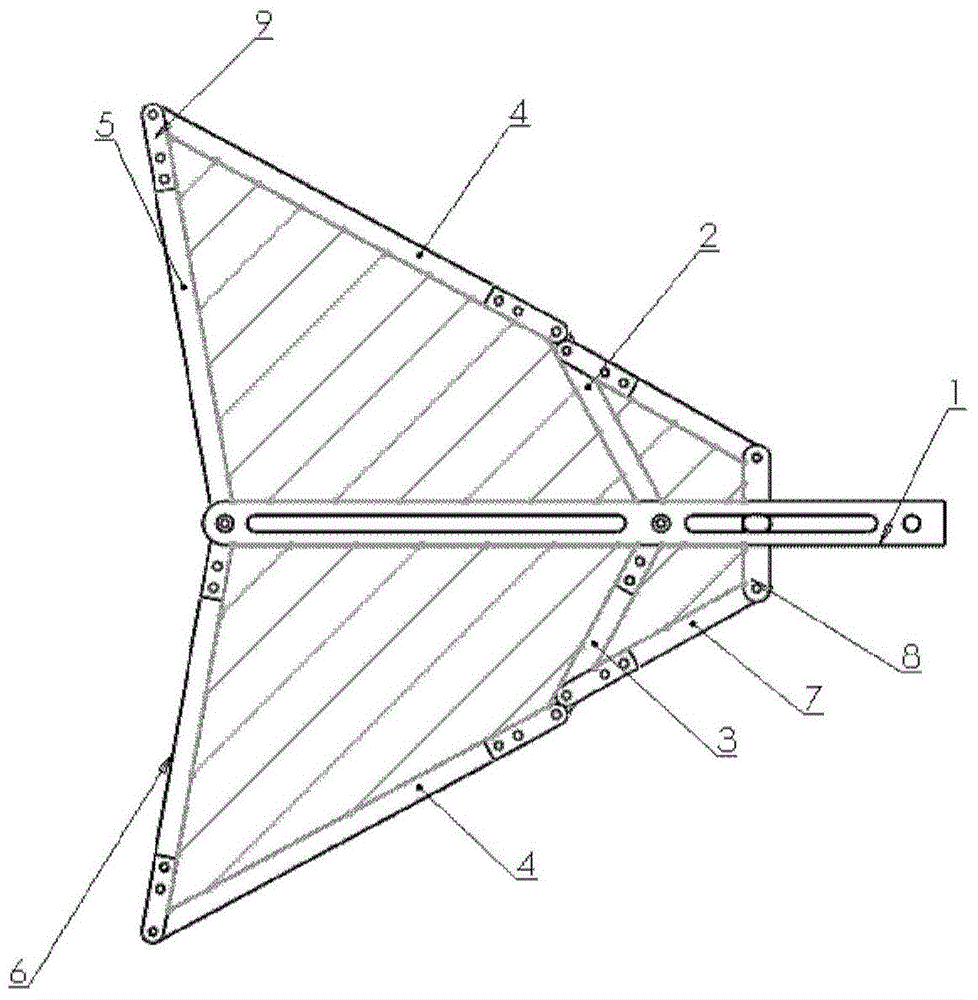
[0020] figure 1 It is a structural schematic diagram of the shape-controllable underwater bionic propulsion device of the present invention, such as figure 1 As shown, the shape-controllable underwater bionic propulsion device includes a central support rod 1, a first connecting rod 2, a second connecting rod 3, two third connecting rods 4, a fourth connecting rod 5, and a fifth connecting rod 6. Two deformed connecting rods 7, a sliding rod 8, a plurality of joints 9, and an envelope, wherein:
[0021] The two ends of the sliding rod 8 are respectively connected with two deformed connecting rods 7 to ensure that the sliding rod 8 can slide without resistance;
[0022] The other ends of the two deformed connecting rods ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More