

Master-slave isomorphic teleoperation main hand of laparoscope minimally-invasive surgery robot
A minimally invasive surgery, robot-based technology, applied in the field of medical robots, can solve problems such as increasing system delay, and achieve the effects of reducing system delay, enhancing intuitiveness, and avoiding motion analysis time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
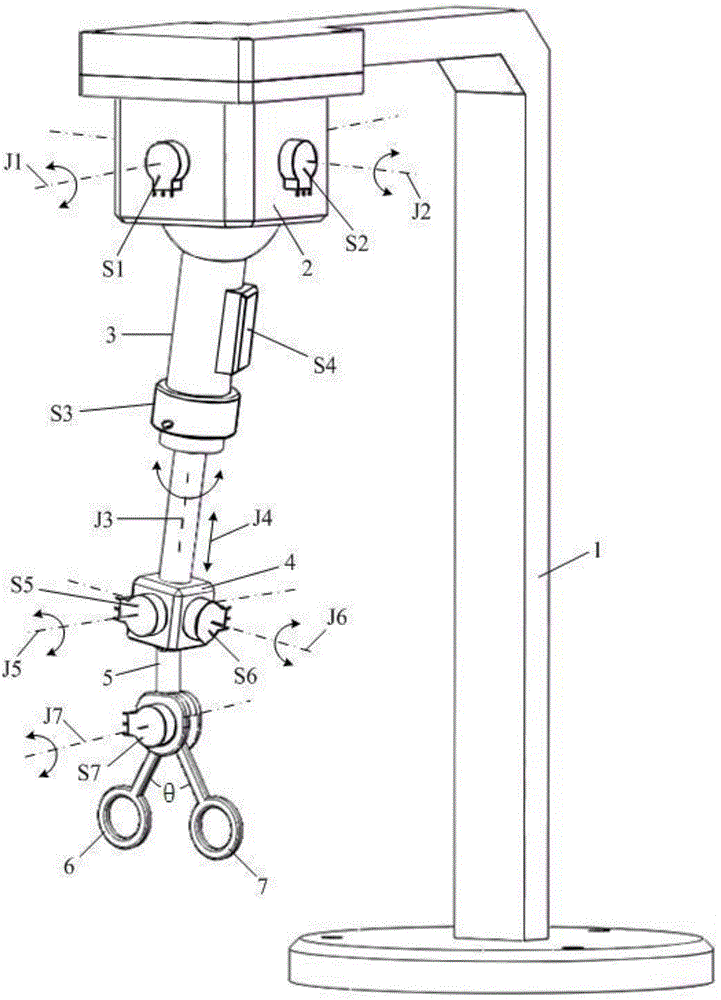
[0017] Such as figure 1 As shown, the laparoscopic minimally invasive surgery robot master-slave isomorphic teleoperation main hand in the present invention mainly includes a base 1, a universal joint mechanism component I2, a universal joint mechanism component II3, a universal joint mechanism component III4, Universal joint mechanism component IV5, thumb component 6 and index finger component 7; the universal joint mechanism component I2 is arranged on the base 1, and the universal joint mechanism component II3 is connected to the universal joint through the rotary joint J1, the rotary joint J2 The mechanism component I2 is connected, and the universal joint mechanism component III4 is connected with the universal joint mechanism component II3 through the rotary joint J3. The rotary joint J3 is provided with a telescopic mechanism J4 that...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More