

Self-motion angle calculating method facing SRS anthropomorphic arm
A calculation method and self-motion technology, applied in the direction of control using feedback, etc., can solve problems such as time-consuming, and achieve the effect of simple algorithm and fast calculation speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0049] The present invention will be further described in detail below in conjunction with accompanying drawings and examples.
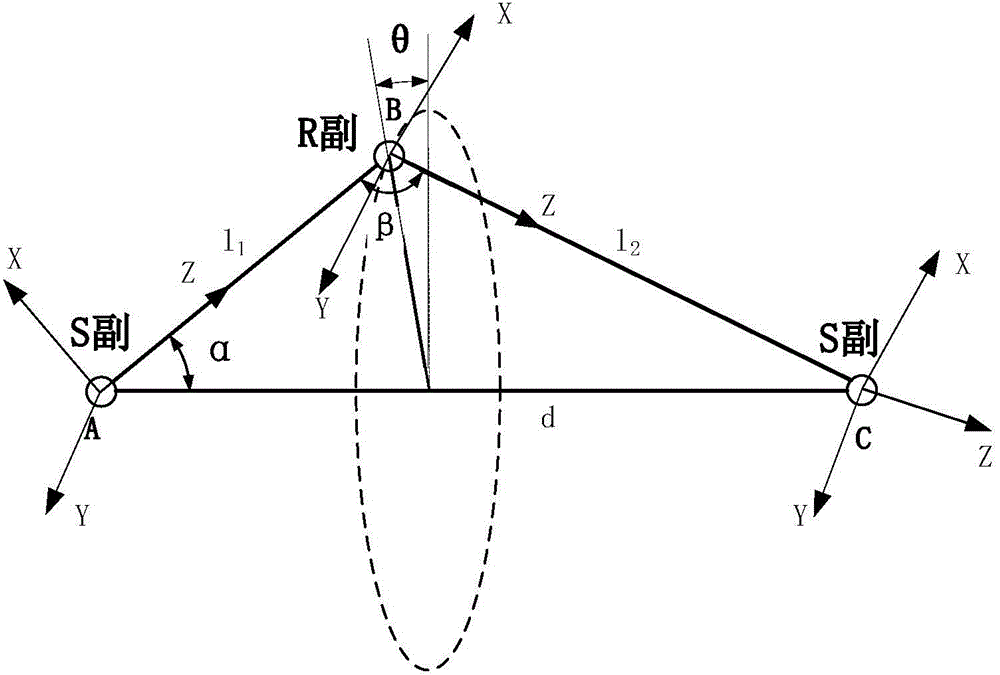
[0050] 1, image 3 Shown is the mechanical arm used to realize the present invention, which is a seven-degree-of-freedom mechanical arm in SRS configuration. The distance l between the center of rotation of the shoulder joint of the robot arm and the axis of rotation of the elbow joint 1 =270, the distance l from the rotation center of the elbow joint to the rotation center of the wrist joint 2 =230.
[0051] 2. Figures 4(a-g) and 5(a-g) are schematic diagrams of joint motion curves of inverse kinematics joints of redundant manipulators implementing the present invention. In this specific example, the task of the robotic arm is to draw an arc and a line. According to the pose of the interpolation point, the inverse kinematics method of the present invention is used to calculate the motion angle of each joint, and the calculated result is transmit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More