

Humanoid robot gait generation method
A humanoid robot and robot technology, applied in the field of robotics, can solve the problems of little active robot research and lack of adaptability analysis
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] The method for generating the gait of a humanoid robot according to the present invention will be described in detail below with reference to the accompanying drawings.
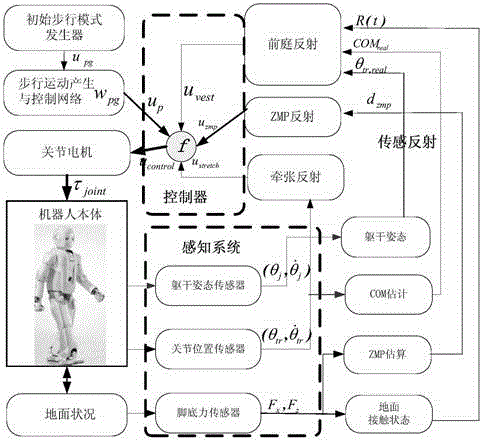
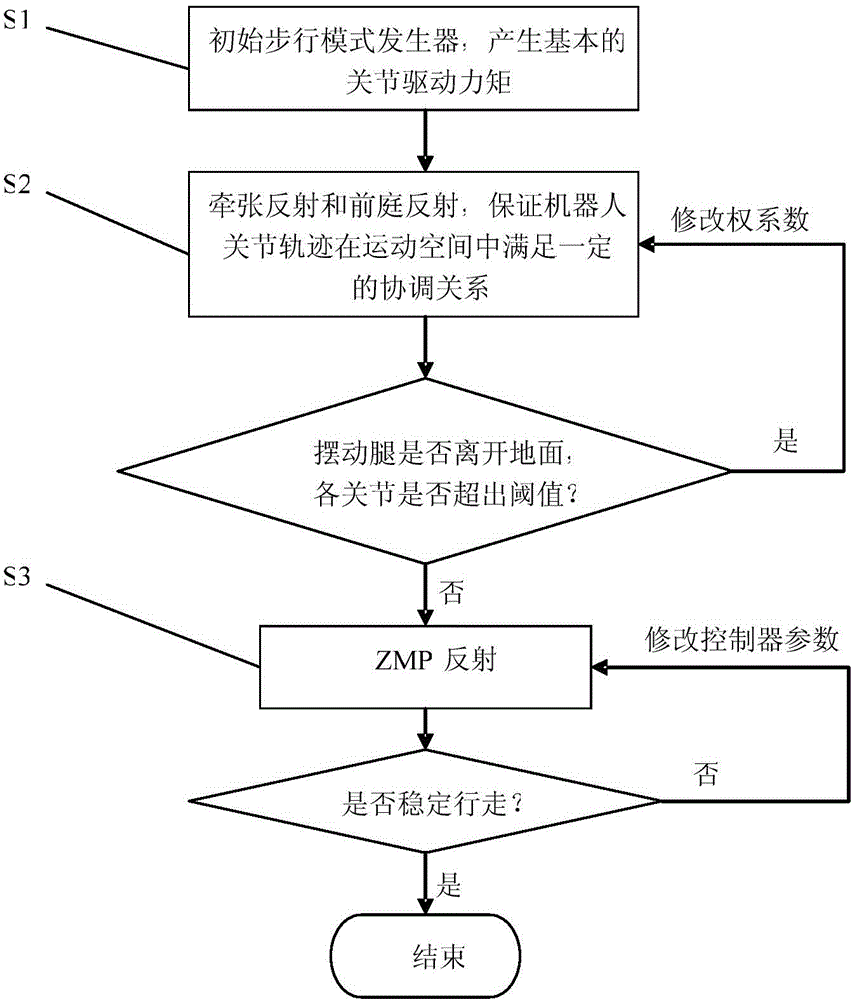
[0013] refer to figure 1 , according to the humanoid robot gait generation method of the present invention comprises the steps: S1, establishes an initial walking pattern generator by analyzing the driving characteristic of human walking, is used to produce the effective walking pattern that makes robot possible motion, and this initial walking pattern generator Generates a joint drive torque u that can be used to achieve basic walking motion p , joint driving torque u p It is related to the walking mode of the robot and the state of walking; S2, the mathematical model of the stretch reflex and the mathematical model of the vestibular reflex are established by sensing the local characteristics of the reflex, and the stretch reflex is used to ensure that the robot swings the leg effectively off the gro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More