

Binocular vision area target depth information extraction and cross section analysis system and method
A technology of regional target and depth information, which is applied in the field of binocular vision regional target depth information extraction and profile analysis system, which can solve the problem of intelligent mobile robots acquiring road condition information ahead of walking, expensive equipment, roughness and slope analysis of the road surface. And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention is described in further detail below in conjunction with accompanying drawing:
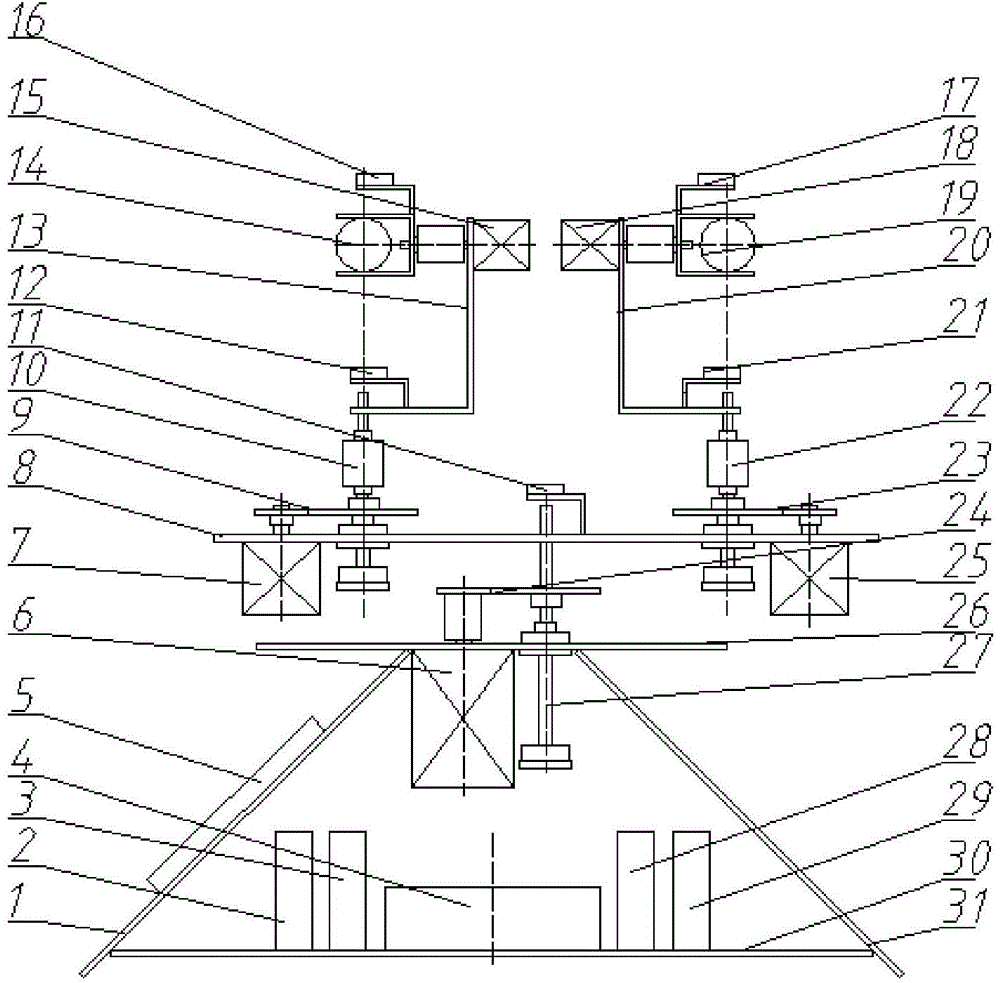
[0032] refer to figure 1 , the depth information extraction and profile analysis system of the binocular vision area target of the present invention comprises a left bracket 1, a right bracket 31, a first driver 2, a second driver 3, a third driver 4, a fourth driver 28, a fifth driver Driver 29, control board 5, first stepper motor 15, second stepper motor 7, third stepper motor 6, fourth stepper motor 25, fifth stepper motor 18, rotating plate 8, first transmission gear Group 9, second transmission gear set 23, third transmission gear set 24, left rotation shaft 10, right rotation shaft 22, main shaft electronic compass 11, left electronic compass 12, right electronic compass 21, left camera bracket 13, right camera bracket 20 , left camera 14, right camera 19, left electronic gyroscope 16, right electronic gyroscope 17, support plate 26, main shaft 27 and base plat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More