

Triaxial truss type high-speed servo robot
A truss-type, robotic technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems affecting the efficiency of injection molding machines, long picking time, and long operating cycle, and achieve shortened sliding range, short pick-and-place cycle, The effect of quick extraction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
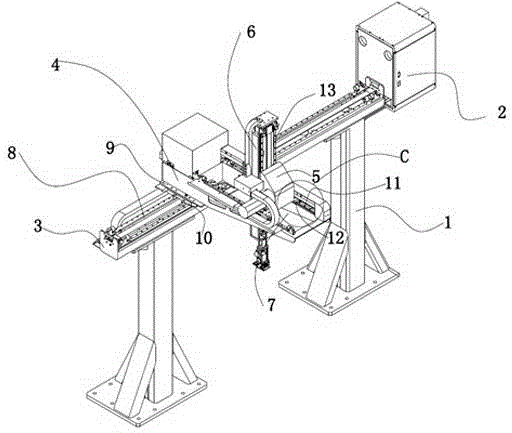
[0017] Such as figure 1 As shown, the three-axis truss type high-speed servo robot provided by the present invention includes a machine base 1, an electric control box 2, a horizontal gun barrel 3, a drawing beam 4, an arm support 5 and an arm beam 6, and the electric control box is located at One side of the horizontal barrel 3, the horizontal barrel 3 is erected on the machine base 1, the drawing beam 4 is erected on the horizontal barrel 3, and the drawing beam 4 moves back and forth along the long direction of the transverse barrel 3 Sliding, the drawing beam 4 is an inverted right-angled trapezoidal structure, and the middle of one end of the drawing beam 4 near the waist of the trapezoid is a hollow shape 7, and the arm beam 6 runs through the hollow part of the drawing beam 4 and passes through the arm bracket. 5 is erected vertically on the drawing beam 4, and the arm support 5 slides back and forth along the long direction of the drawing beam 4; at the same time, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More