

Synchronous displacement adjustment type variable-stiffness joint driver and adjustment method for robot joint stiffness
A technology of synchronous adjustment and variable stiffness, applied in the field of robotics, can solve the problems of inability to achieve precise synchronous displacement adjustment, high energy consumption of robots, and poor environmental adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] A specific embodiment of the present invention will be described in detail below in conjunction with the accompanying drawings.
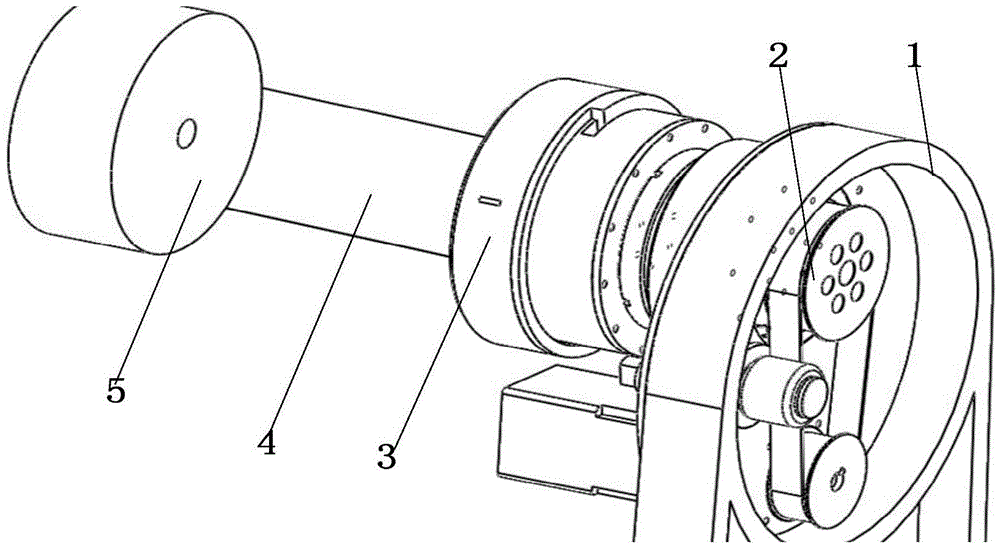
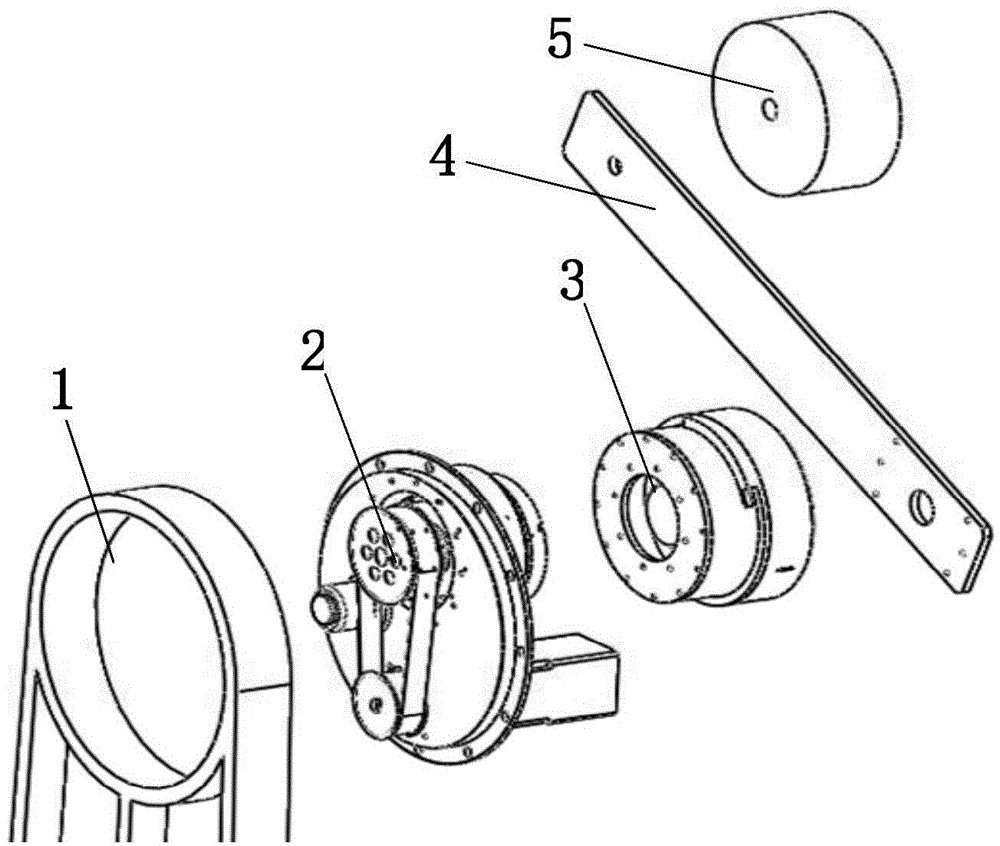
[0026] Such as figure 1 and figure 2 Shown is a synchronously adjustable displacement variable stiffness joint driver according to an embodiment of the present invention, which includes: a base 1, a rocker arm position control assembly 2, a variable stiffness adjustment assembly 3, and a rocker arm 4; wherein, The rocker arm position control assembly 2 is fixed on the base 1, the variable stiffness adjustment assembly 3 is connected in series between the rocker arm 4 and the rocker arm position control assembly 2, and a load 5 is fixed at the end of the rocker arm 4.
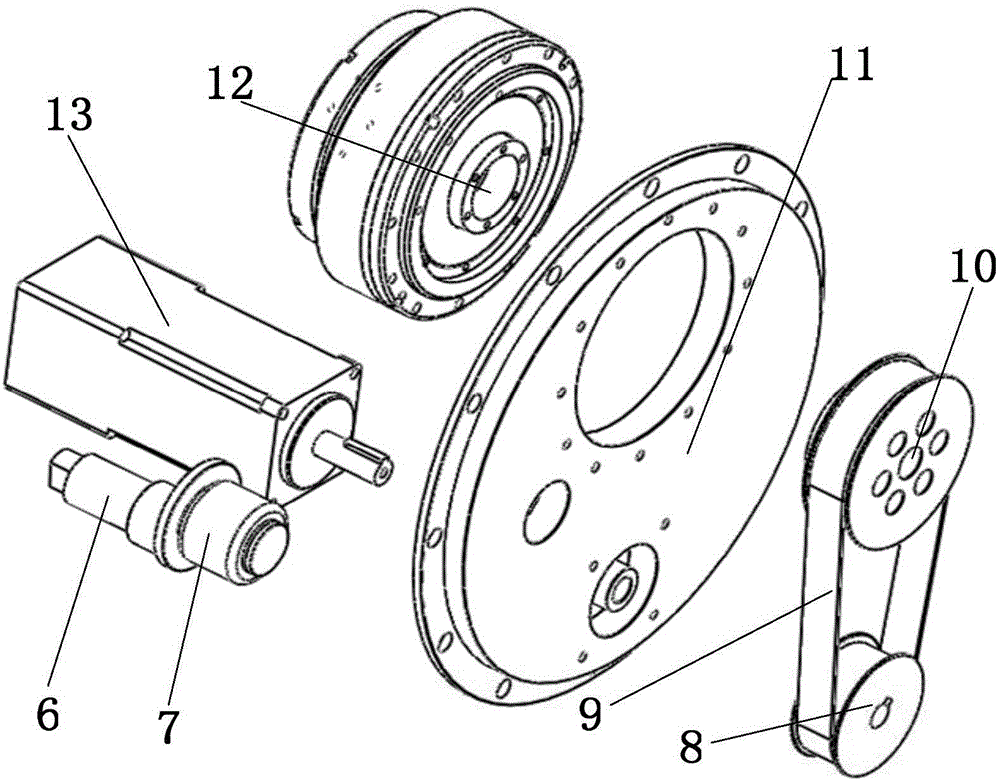
[0027] Such as image 3 As shown, the rocker arm position control assembly 2 of the variable stiffness joint driver according to an embodiment of the present invention includes: an eccentric shaft 6, a tension pulley 7, a small power synchronous pulley 8, a main power synchr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More