

Multi-directional barrier avoiding system of mobile robot
A mobile robot and multi-directional technology, applied in two-dimensional position/channel control and other directions, can solve problems such as blind spots in measurement, inability to detect moving obstacles in real time, slow response of ultrasonic sensors, etc., and achieve the effect of path planning and navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
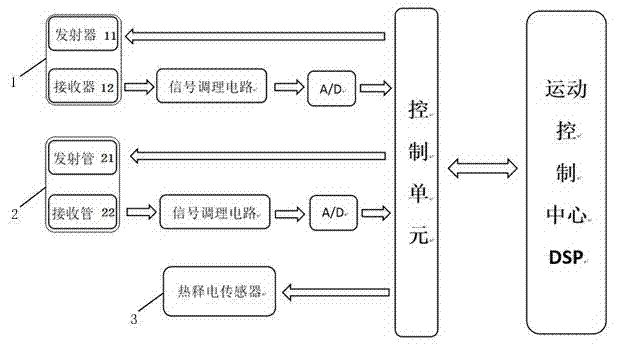
[0012] A multi-directional obstacle avoidance system for a mobile robot proposed by the present invention will be described in detail below in conjunction with the accompanying drawings.
[0013] Such as figure 1 As shown, a mobile robot multi-directional obstacle avoidance system of the present invention includes an ultrasonic sensor 1, an infrared sensor 2, a pyroelectric sensor 3, an analog signal conditioning circuit and a central control unit. The analog signal conditioning circuit is used for amplifying, filtering, peak extraction and shaping the above-mentioned signals.
[0014] The ultrasonic sensor 1 is connected to the central control unit through an analog signal conditioning circuit. The ultrasonic sensor 1 includes a transmitter 11 and a receiver 12 for transmitting ultrasonic waves and detecting return signals, and converting them into analog signals if there is a return signal.
[0015] The analog signal returned by the infrared sensor 2 is amplified, filtered...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More