

Mobile hole-making robot standard alignment method based on high precision industrial camera
A technology of industrial robots and industrial cameras, applied in metal processing machinery parts, manufacturing tools, metal processing equipment, etc., can solve the problems of cumbersome, expensive, relative position changes, etc., to reduce the workload of measurement and operating procedures simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] Describe the present invention below in conjunction with specific embodiment:
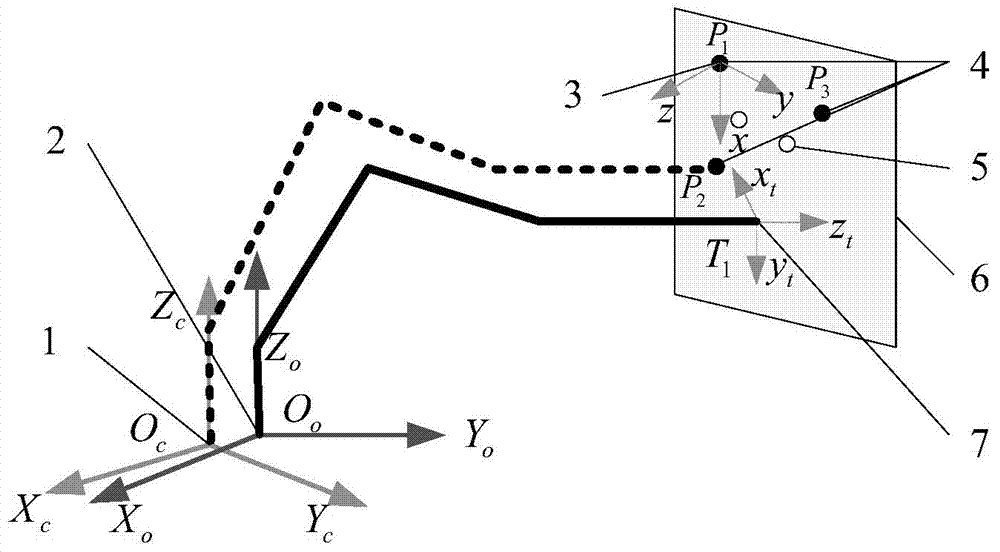
[0033] Refer to attached figure 1 , this embodiment mainly introduces the datum alignment method based on the industrial camera in the automatic hole making system of the mobile robot. The main factors affecting the positioning accuracy of the mobile robot hole making system are the positioning deviation of the mobile device and the installation error of the components, resulting in the difference between the relative position of the mobile robot and the components and the theoretical position in the offline programming digital model.
[0034] Move the robot in place, the actual position 2 of the robot does not coincide with the theoretical position 1 of the robot, resulting in a discrepancy between the workpiece coordinate system and the actual workpiece coordinate system established through the reference holes P1, P2 or P1, P2, P3 on the component to be holed in offline programming. There...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More