

Method and system for calibrating multiple cameras
A camera and calibration error technology, which is applied in the field of calibration of multiple cameras, can solve problems such as inaccurate object position positioning, error accumulation and propagation, and large binocular camera errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to enable those skilled in the art to better understand the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
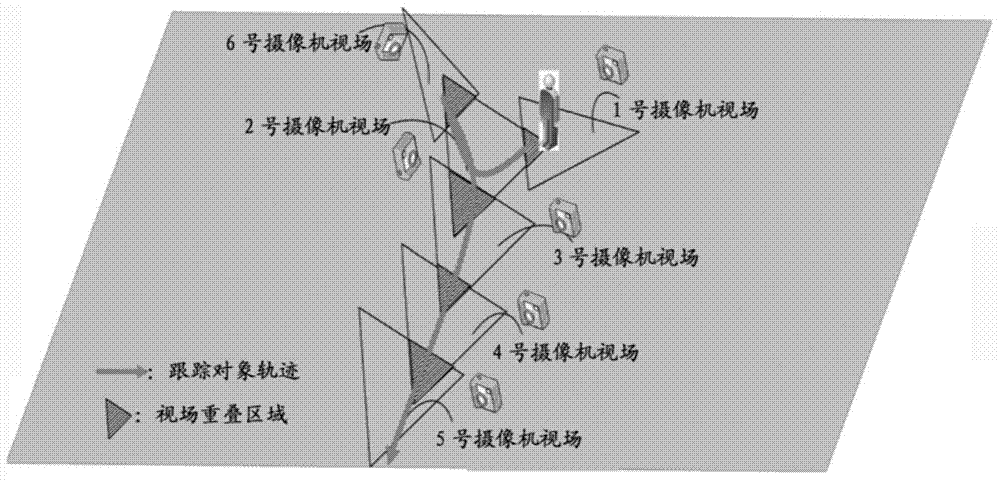
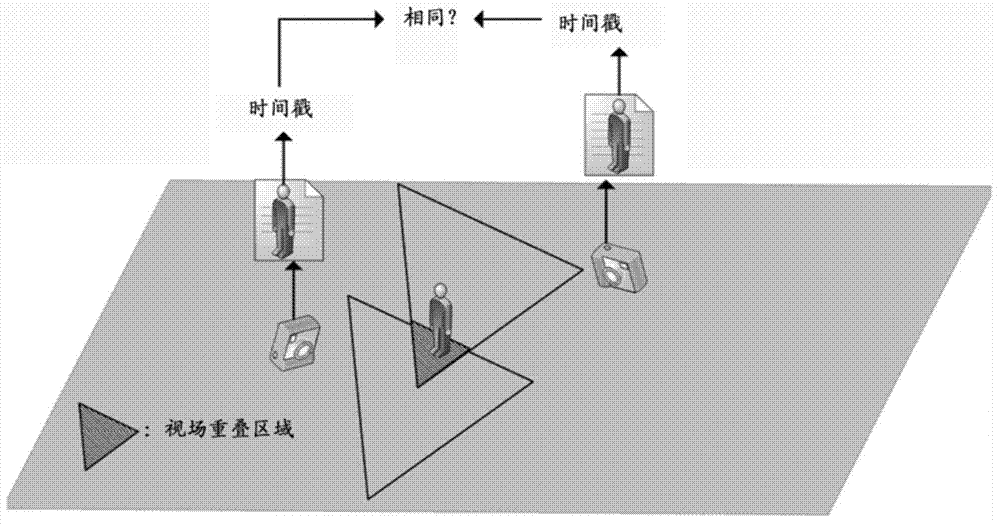
[0026] figure 1 is a schematic diagram of a site for calibrating multiple cameras according to an embodiment of the present invention. Such as figure 1 As shown, 6 binocular stereo cameras are deployed, and each binocular stereo camera is given a corresponding number. although Figure 7 6 binocular stereo cameras are given in , but the present invention can be applied to any number of binocular stereo cameras, such as 4, 5, 7, 8, 9.... figure 1 The middle triangle area represents the field of view that can be captured by each camera, and the overlapping shaded area of two adjacent triangles represents the overlapping area of the field of view between two different cameras. figure 2What is shown is a schematic diagram of judging the overlap...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More