

Compensation method for temperature drift of robot wrist force sensor
A technology of temperature drift and compensation method, applied in the field of sensor compensation, can solve problems such as slow convergence speed, and achieve the effect of good curve linearity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
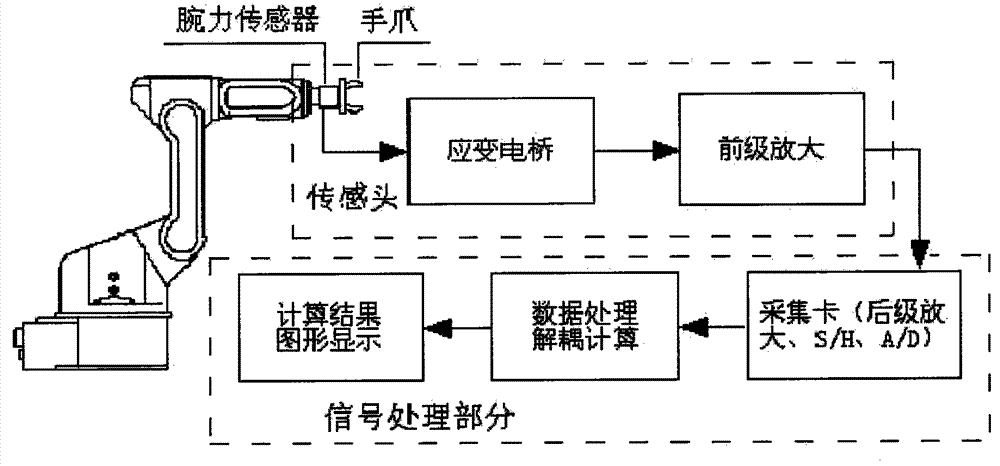
[0028] 1. The basic structure of the wrist force sensor commonly used in industrial robots in the present invention, such as figure 1 As shown, it mainly consists of the following two parts:
[0029] 1) The sensing head part. This part mainly includes a pressure strain body, a strain bridge, and a pre-amplifier, etc., which can convert the force signal into an electrical signal and amplify the electrical signal in the early stage. when the temperature
[0030] 2) Signal processing part. This part is mainly for post-stage amplification, signal filtering, A / D conversion, etc. At the same time, ot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More