

A manipulator for a packing robot
A technology of manipulators and robots, applied in the field of manipulators, can solve the problems of inflexible adjustment and control, slow running speed, poor stability, etc., and achieve the effects of efficient and flexible adjustment and control, stable operation, and agile movements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Although the present invention has been described with reference to specific embodiments, those skilled in the art will be able to make obvious modifications and modifications to the present invention after reading the above description without departing from the intent and essence of the present invention. The present invention intends to include such modifications and modifications within the scope of the claims.
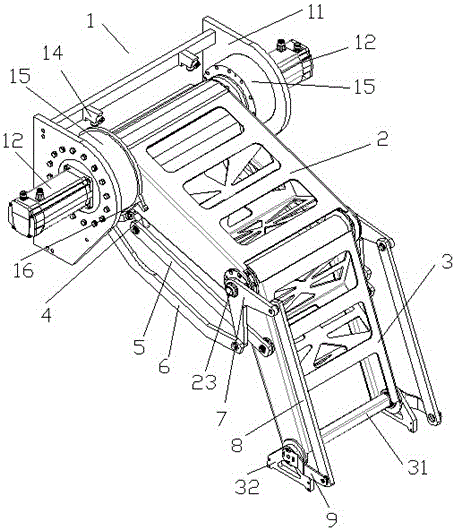
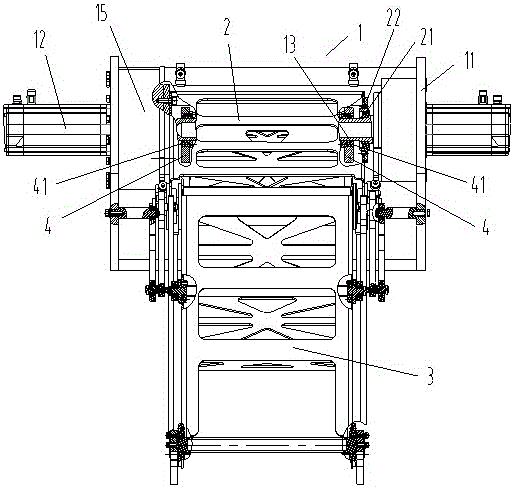
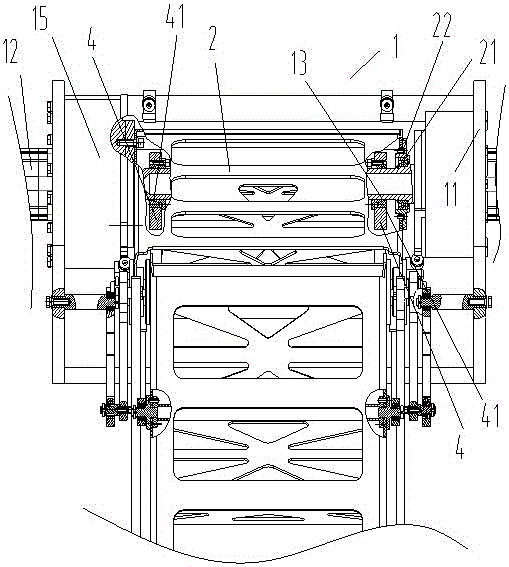
[0026] A manipulator for a box packing robot such as Figure 1 to Figure 5 As shown, it includes a motor assembly 1, a boom 2, a small arm 3, a swing arm 4, a drive rod 5 and a main link 6, and the motor assembly 1 includes a mounting base 11, a motor 12 and a main shaft 13, and the mounting base 11 A limit block 14 is arranged on the rear plate of the base to limit the range of rotation. Motors 12 are respectively installed at both ends of the mounting seat 11. The motors 12 are respectively connected to a reducer 15, and a limit ring is installed on the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More