

Non-contact type computer operating method based on Leap Motion
A non-contact, computer technology, applied in the field of human-computer interaction, to achieve the effect of low cost, large space and small volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
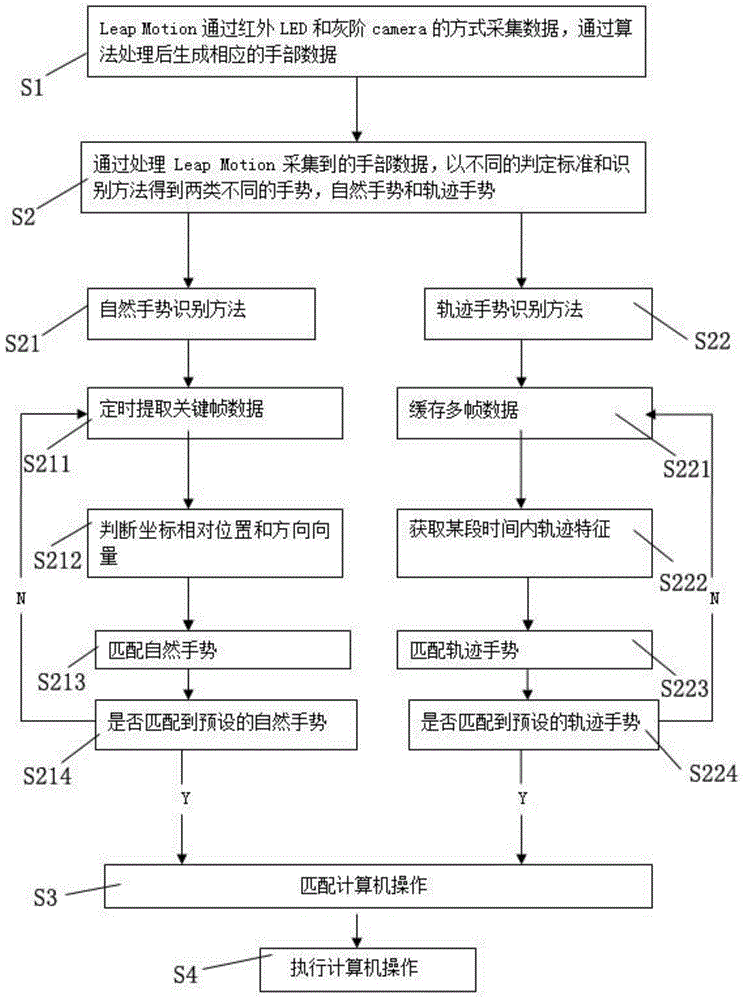
[0030] Please refer to figure 1 , figure 1 A flowchart of a non-contact computer control method based on Leap Motion of the present invention. A kind of non-contact computer manipulation method based on Leap Motion, described non-contact computer manipulation method comprises the following steps:
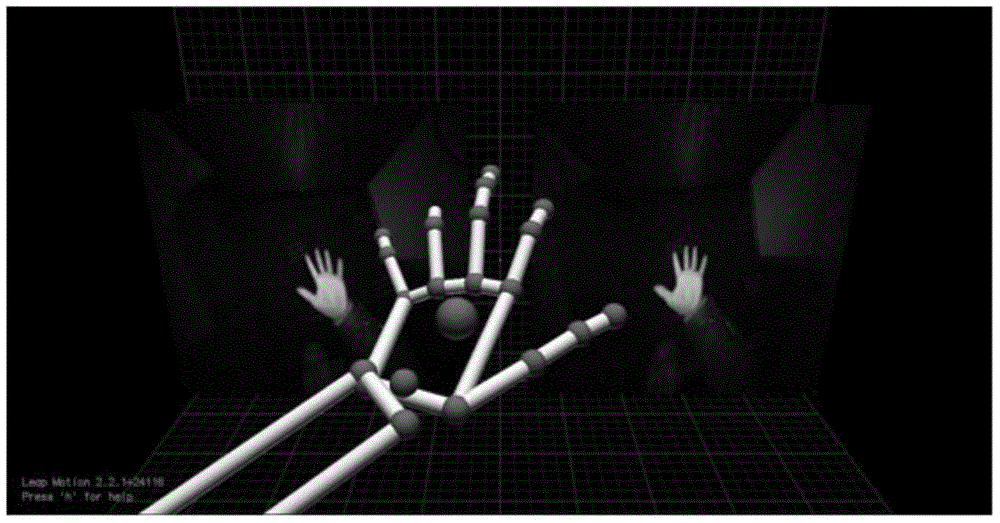
[0031] S1: Leap Motion collects data through infrared LEDs and grayscale cameras, and generates corresponding hand data after algorithm processing; the hand data includes three-dimensional space coordinates, hand vectors and bone models. Such as figure 2 as shown, figure 2 Raw data and processed skeletal model images collected for Leap Motion.
[0032] S2: By processing the hand data collected by Leap Motion, two different types of gestures, natural gestures and trajectory gestures, are obtained with different criteria and recognition methods;
[0033] S3: matching computer operations;
[0034] S4: Execute computer operations.
[0035] Preferably, step S2 includes S21: natu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More