

Movement compensation method of surgical robot for positioning and guiding for bone surgery
A technology of robot movement and surgical robot, which is applied in the field of computer-aided minimally invasive therapy, can solve problems such as unavailability of analytical algorithms, prolonged operation time, radiation and image processing time, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
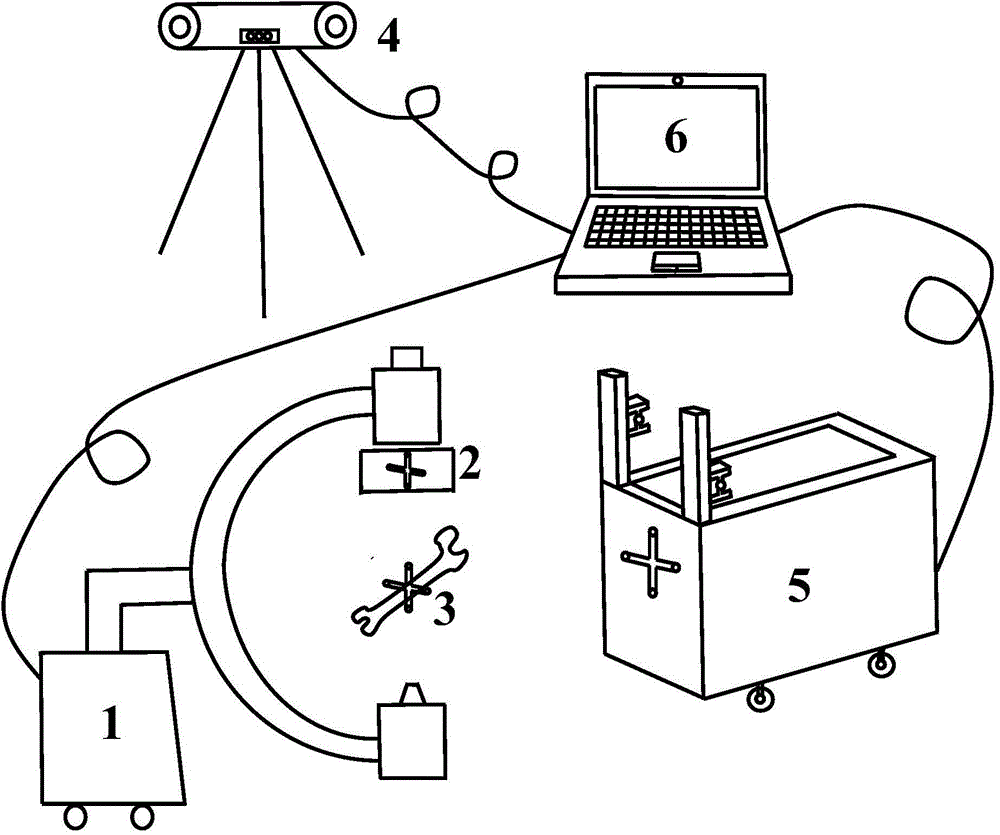
[0116] Based on the above ideas, we propose a method of using the optical positioning subsystem to establish the dynamic connection between the intraoperative image, the target mask, the patient and the biplane surgical robot to realize the motion compensation of the biplane surgical robot, and design a corresponding Operating procedures. The target mask fixed on the image intensifier of the C-arm X-ray machine is used to replace the stereo calibration frame of the traditional double-plane surgical robot body, which reduces the difficulty of obtaining images; the optical positioning subsystem is used to obtain the outer surface of the C-arm X-ray machine. The perspective parameters are used to calibrate and reconstruct the C-arm X-ray machine, so as to establish a dynamic connection between the optical positioning subsystem, image, target mask, patient and biplane surgical robot, and achieve the effect of motion compensation. The method has reliable precision and can reduce op...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More