

Neural network adaptive robust trajectory tracking method and controller
An adaptive robust, trajectory tracking technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of poor control effect and poor stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention.
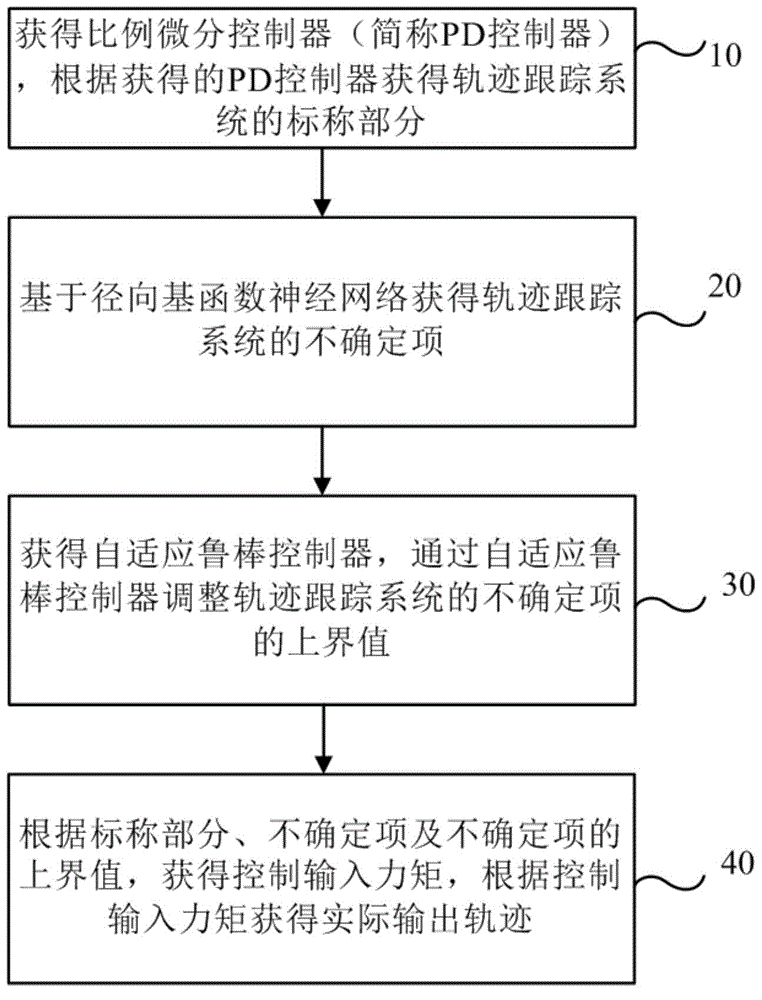
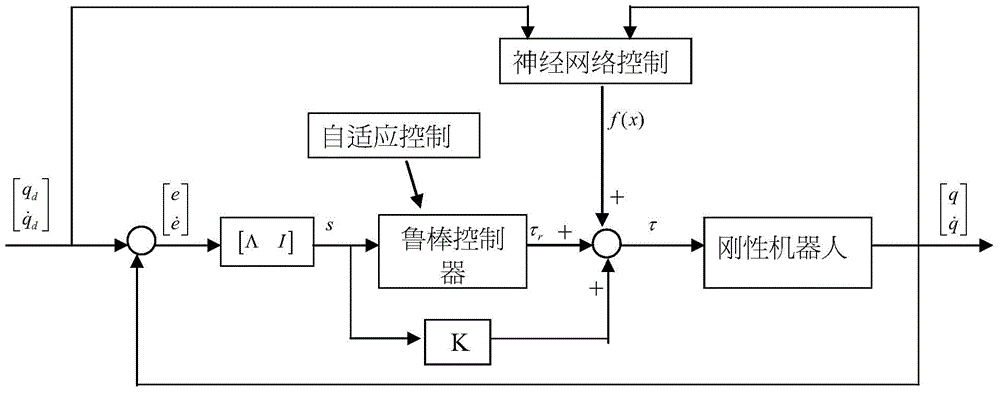
[0074] The example of the present invention combines neural network with robust adaptive control, and proposes an adaptive robust trajectory tracking control strategy based on neural network for uncertain robots. Firstly, the nominal part of the trajectory tracking system is obtained through the PD controller, and then the uncertain items of the trajectory tracking system are obtained through the neural network, and then the adaptive robust controller is used to reduce the approximation error of the neural network, in which the adaptive law is used for Tuning of Uncertain Parameters for Robust Controllers.
[0075] Uncertain robots are those that have unmodeled dynam...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More