

Trolley capable of automatically following mobile terminal to walk
A mobile terminal and automatic follow-up technology, applied in two-dimensional position/channel control and other directions, can solve problems such as easy noise, hidden safety hazards, expensive products, etc., and achieve the effect of low cost, high real-time performance, and easy shopping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
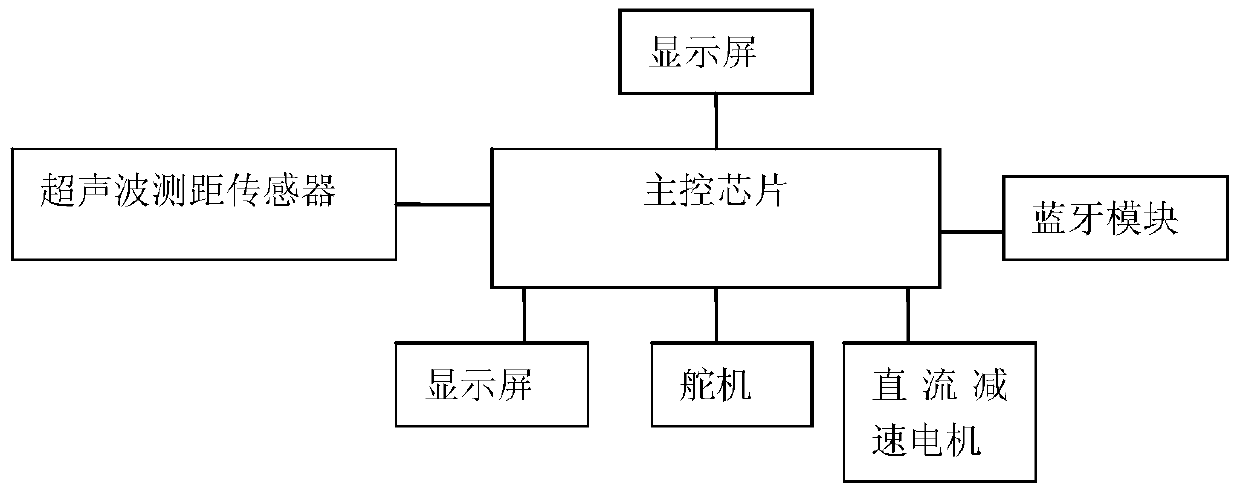
[0019] see figure 1 , The car that can automatically follow the mobile terminal in the present invention includes a STM32F103 main control chip, an electronic compass module, a Bluetooth module, an ultrasonic distance measuring sensor, a DC gear motor, a steering gear and an LCD display. The electronic compass module and the main control chip are connected by IIC (PB8, PB9) communication, the LCD display and the main control chip are connected by SPI communication, the Bluetooth module and the main control chip are connected and communicated by USART, and the DC gear motor and steering gear are It is directly connected to the main control chip through GPIO.
[0020] The main control chip is used to calculate the steering angle value of the car according to the orientation information of the car and the mobile terminal, and output the calculation result to the driving circuit of the steering gear, and finally the steering gear controls the steering of the car. The DC geared mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More