

Plane two-freedom moving device
A technology of moving devices and degrees of freedom, which is applied in the directions of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of high cost, low efficiency, complex device structure, etc., and achieve the effect of simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
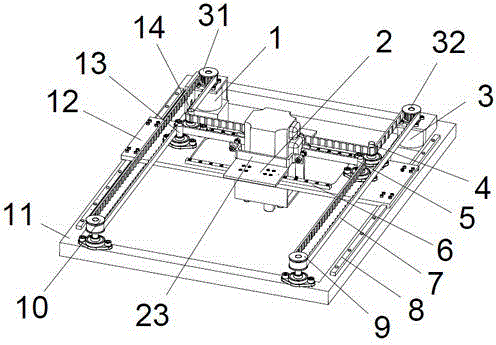
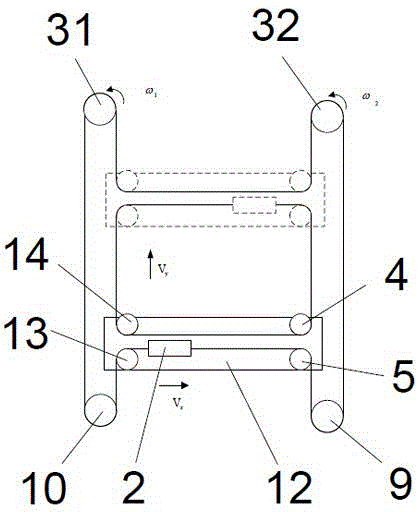
[0019] With reference to accompanying drawing, a kind of planar two-degree-of-freedom moving device is provided with Y-direction slide rails 8 on both sides of the operating platform 11, and a chute 81 is provided at the two slide rails corresponding to the operating platform at the lower end of the slide plate 12, and the slide plate and The slide rails are connected through the structure of the slider chute; two synchronous motors 1 and 3 are respectively installed on the same side of the two Y-direction slide rails, and two reversing wheels 9 and 10 are respectively installed on the ends of the two Y-direction slide rails. On the other side, four transmission bushings 4, 5, 13, 14 are fixed on the slide plate; two ends of a synchronous belt 7 are respectively connected with both sides of the working slider 2, and this synchronous belt is connected to the left side of the working slider. side, bypassing the first transmission sleeve 13, the first reversing synchronous pulley ...
Embodiment 2
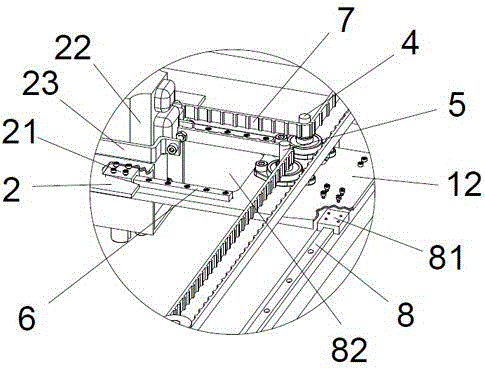
[0028] Different from Embodiment 1, this embodiment uses the planar two-degree-of-freedom device for the planar drive of the grinding head of the grinding robot, opens a through hole 82 on the slide plate, installs the grinding head 22 on the working slider, and the lower end of the grinding head Pass through the through hole 82 on the slide.
[0029] The grinding head can move freely on the plane, which is convenient for the grinding robot to grind the working surface.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More