

Transformer substation inspection robot track calculation method and device based on inter-wheel differential
An inspection robot and dead track reckoning technology, which is applied in the direction of navigation through speed/acceleration measurement, can solve the problems of complex hardware circuit and high data synchronization requirements, and achieve the effect of simple parameter debugging, easy algorithm implementation and cost reduction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
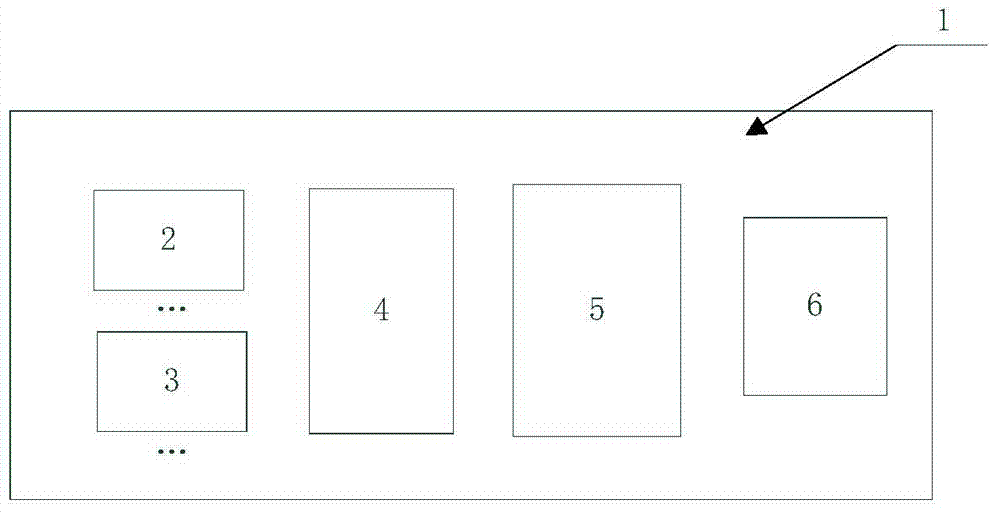
[0041] Such as figure 1As shown, the dead reckoning transposition of the substation inspection robot based on the differential speed between wheels includes a circuit board 1 of the dead reckoning device, on which there is a signal interface 2 of the speed sensor of the left wheel of the robot, and a signal interface of the speed sensor of the right wheel of the robot 3. The output signals of the speed sensor signal interfaces 2 and 3 are connected to the signal conditioning circuit 4, the signal conditioning circuit 4 is connected to the controller 5, and the dead reckoning device is connected to the industrial computer or other control systems through the communication interface 6.
[0042] The signal interface 2 of the robot left wheel speed sensor can have multiple signal accesses for multi-wheel speed sensors on the same side;
[0043] The signal ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More