

Method and device for controlling groove of workpiece cut by robot
A technology of robots and workpieces, applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve time-consuming, labor-intensive and precision problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0050] Preferred embodiments of the present invention will be specifically described below in conjunction with the accompanying drawings, wherein the accompanying drawings constitute a part of the application and are used together with the embodiments of the present invention to explain the principle of the present invention.
[0051] First, combined with the Figures 1 to 8 The method described in the embodiment of the present invention is described in detail.
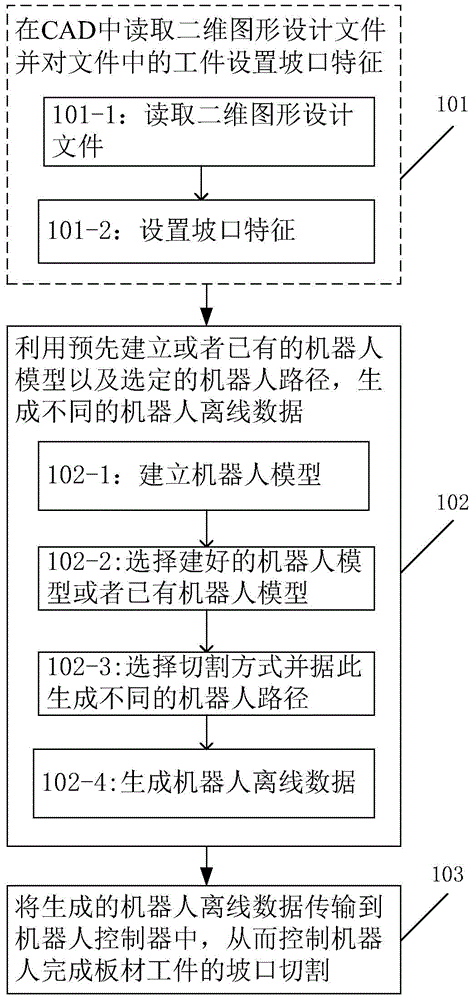
[0052] Such as figure 1 as shown, figure 1 It is a schematic flow chart of the method described in the embodiment of the present invention, which may specifically include:
[0053] Step 101: Read the dwg format file of the CAD graphics of the plate workpiece, select the bevel cutting edge and set the groove height and angle parameters, and complete the setting of the bevel feature of the plate workpiece.
[0054] The above step 101 may specifically include:
[0055] Step 101-1: In CAD, open the existing two-dimensio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More