

Front wheel steering mechanism suitable for unmanned aerial vehicle
A front-wheel steering and unmanned aerial vehicle technology, which is applied in the field of unmanned aerial vehicles, can solve problems such as the inability to control the measurement of the front wheel around the rotation axis, and achieve the effects of convenient structural assembly, easy implementation, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The technical solution of the present invention will be described in further detail below in conjunction with the accompanying drawings.
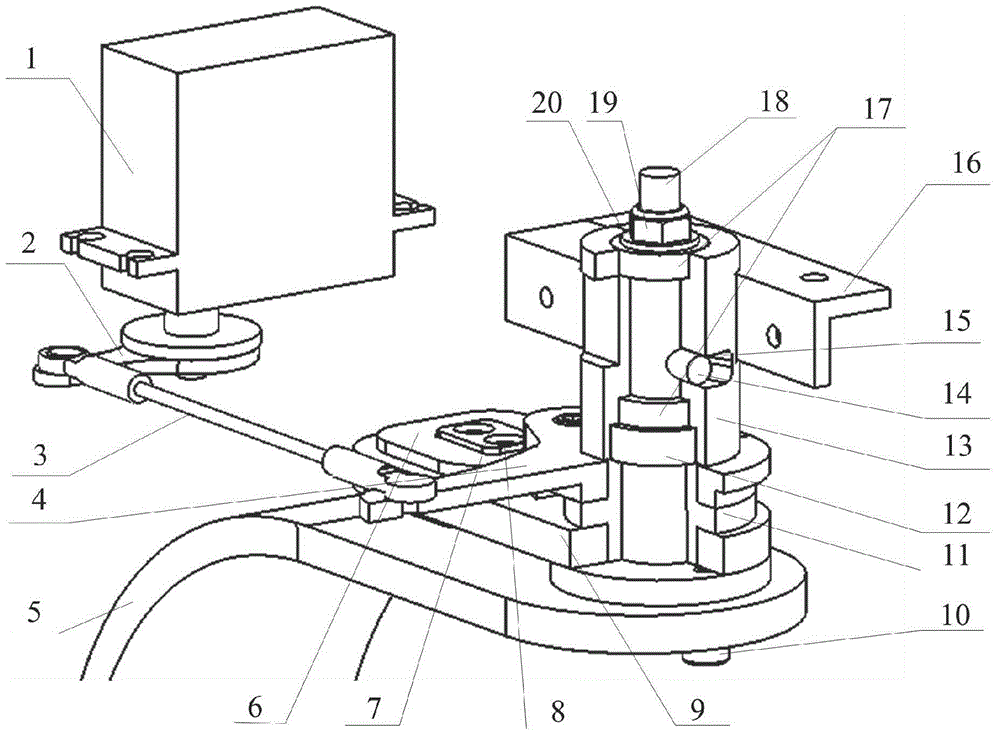
[0016] Such as figure 1 As shown, it is suitable for the front wheel steering mechanism of the drone, and the rotating shaft 18 is fixedly connected with the front leaf spring 5 through the rotating shaft fixing screw 10 . The bearing seat 13 is connected to the mounting support 16 by clamping, and it is connected to the rotating shaft 18 through a thrust bearing 12 and two rolling bearings 17, and the rotating shaft 18 is connected to the inner ring of the rolling bearing 17 by a compression nut 19 and a washer 20. Press tight.
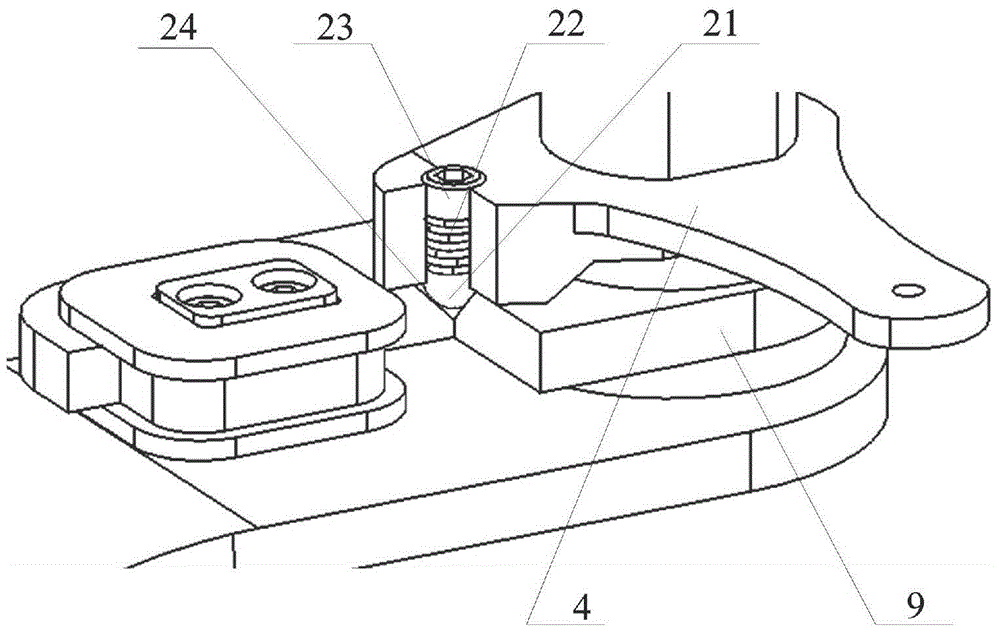
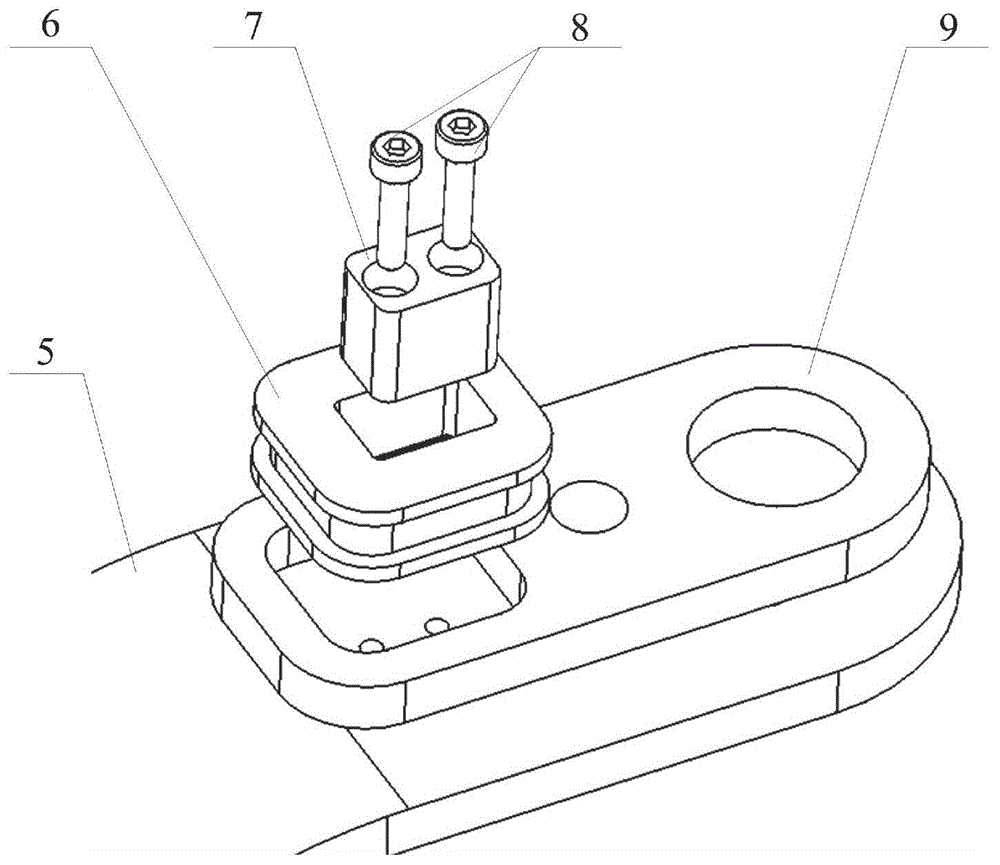
[0017] Vibration-damping rubber 6 outer rings are enclosed within the square hole of steering bracket 9, and steering block 7 is contained in the endoporus of vibration-damping rubber 6, and steering block fixing screw 8 is fixedly connected with steering block 7 and front leaf spring 5.
[0018] The axle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More