

A hand-eye calibration method for manipulator based on active binocular vision
A technology of binocular vision and hand-eye calibration, which is applied in the direction of instruments, measuring devices, and optical devices. It can solve the problems of not very strict camera calibration accuracy, adding marker points at the end of the manipulator, and complex hand-eye calibration algorithms. It is easy to operate, The effect of simple algorithm and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
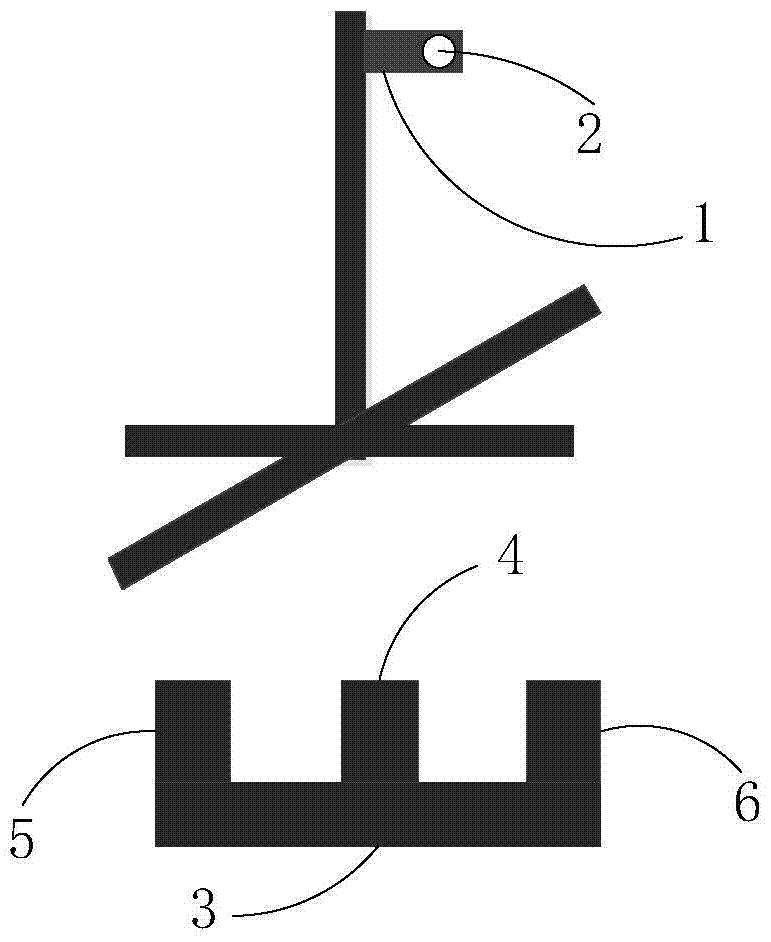
[0024] A kind of hand-eye calibration method of manipulator based on active binocular vision of the present invention, refer to figure 1 As shown, it includes a manipulator 1 and a manipulator end 2, and also includes an active binocular vision sensor 3. The active binocular vision sensor 3 consists of a binocular vision sensor left camera 5, a binocular vision sensor right camera 6 and a structured light generator 4. composition. In order to ensure that the coding pattern projected by the light structure generator 4 to the end of the manipulator can be captured by the two cameras, the structured light generator 4 is located between the left camera 5 of the binocular vision sensor and the right camera 6 of the binocular vision sensor.
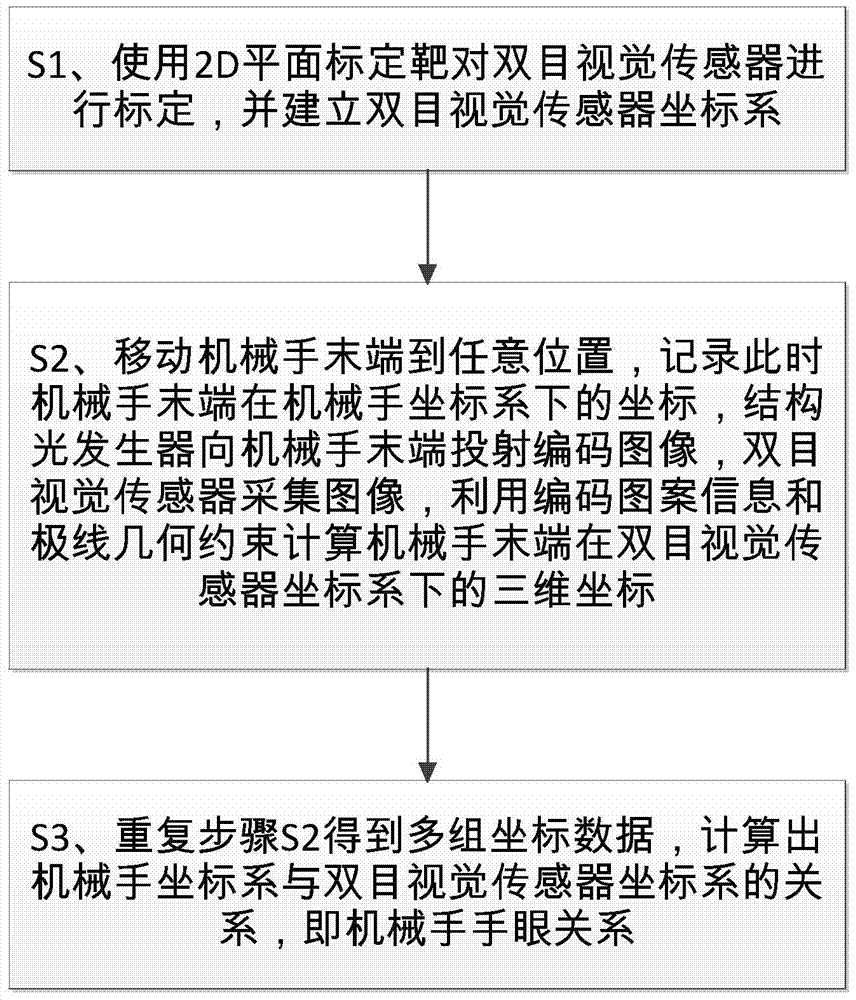
[0025] refer to image 3 As shown, a kind of hand-eye calibration method of a manipulator based on active binocular vision of the present invention specifically includes the following steps:
[0026] S1. Use the 2D plane calibration target to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More