

Enhanced coupling nonlinear control method with state restraining for three-dimensional bridge crane
A non-linear control and bridge crane technology, which is applied in the direction of load suspension components, transportation and packaging, etc., can solve the problems that the error signal range cannot be guaranteed, and the working efficiency of the two-dimensional bridge crane system is low.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
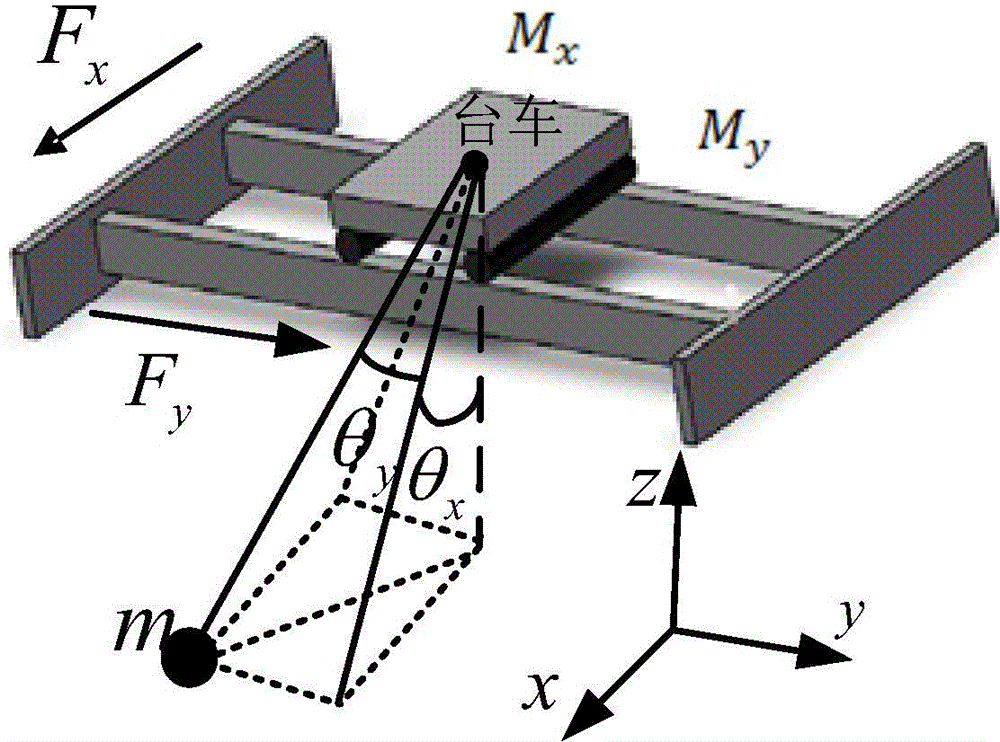
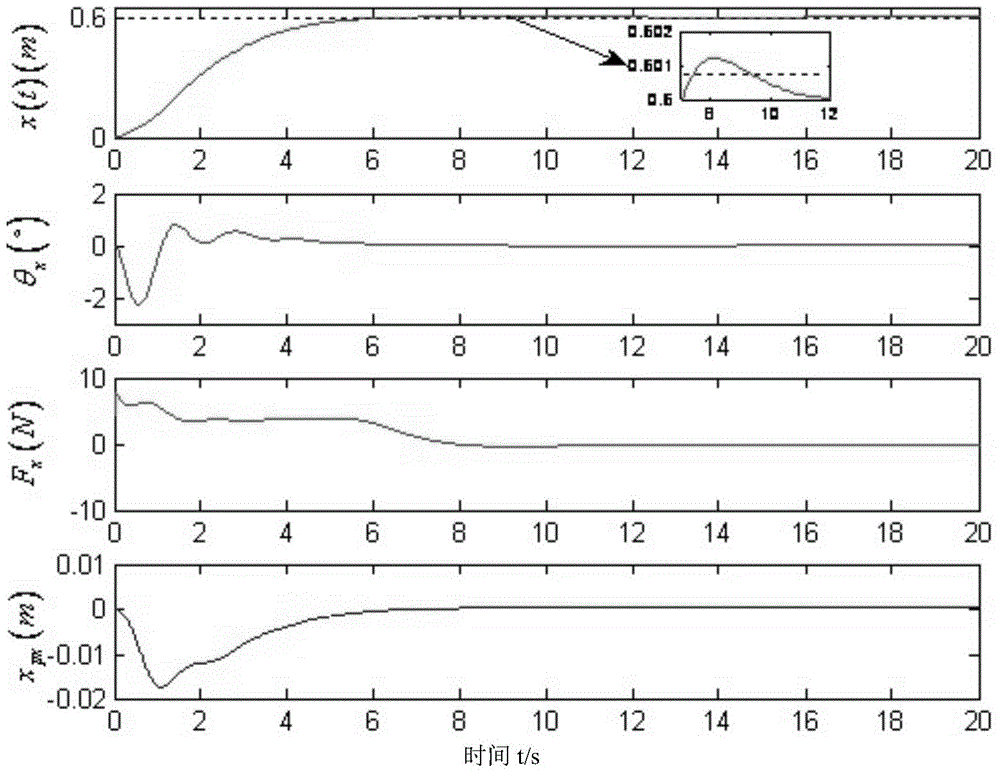
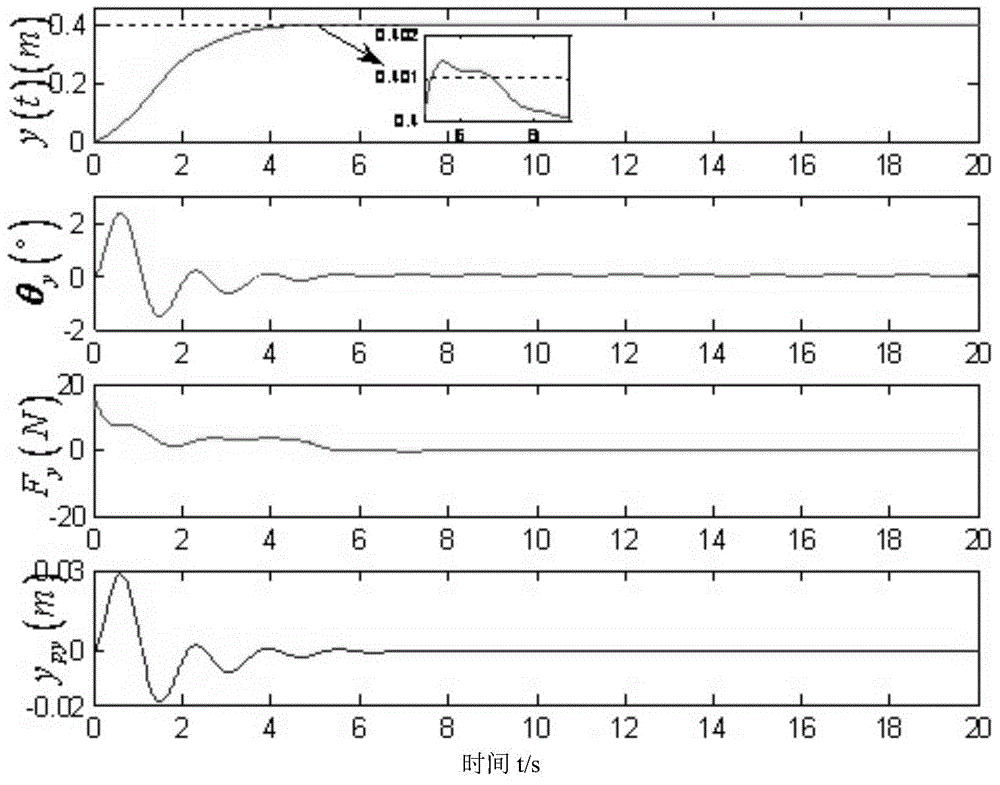
[0115] The enhanced coupled nonlinear control method with state constraints of the present invention is used for figure 1 The three-dimensional overhead crane system shown. First, two generalized signals combining the displacement of the trolley and the swing angle of the load are introduced, and the dual goals of precise positioning of the trolley and effectively eliminating the swing of the load are converted into the regulation and control of the generalized signals, and a new similar energy function is constructed based on this; In order to keep the tracking error of the trolley and the load swing angle within the allowable range, a new energy storage function is designed by combining two "potential functions" with a new energy-like function, and a new energy storage function is proposed on this basis. A Control Method for Enhanced Coupled Nonlinearity with State Constraints. The stability of the closed-loop system at the equilibrium point is proved by Lyapunov theorem an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More