Self-adaptive inverse control method for unmanned rotorcraft based on neural networks
A rotor unmanned, self-adaptive inverse technology, applied in the field of unmanned aerial vehicles, can solve the problems of mismatching system models, the controller cannot achieve the control effect, etc., and achieve good robustness, good consistency, and good control effect. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
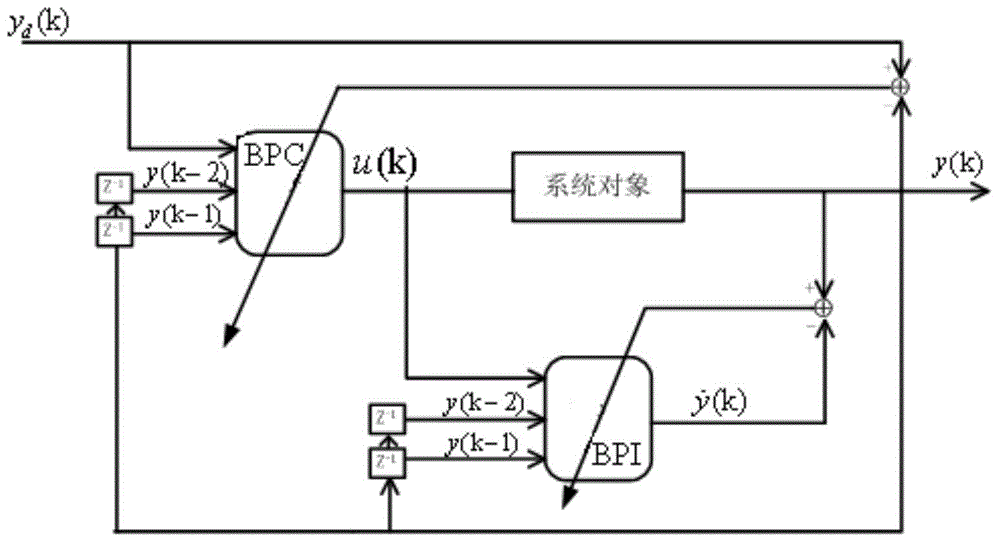
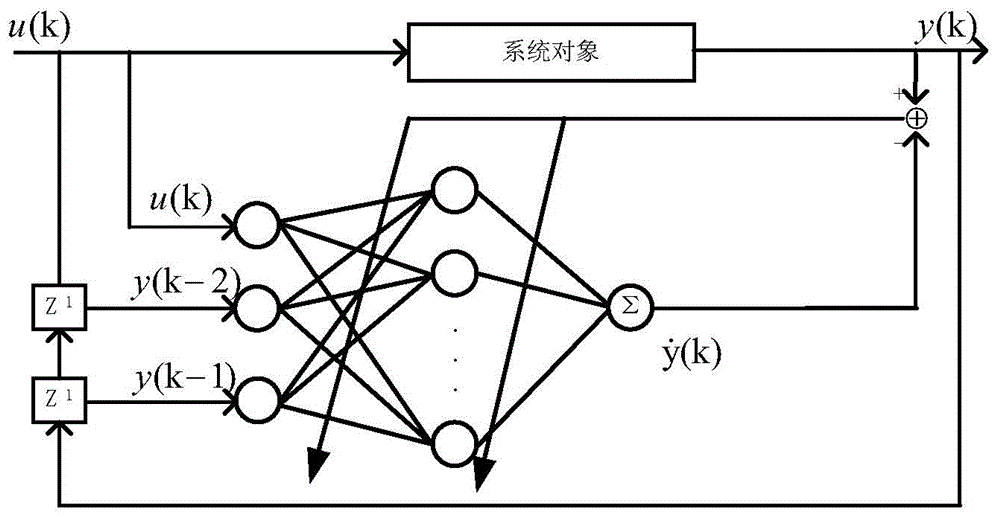
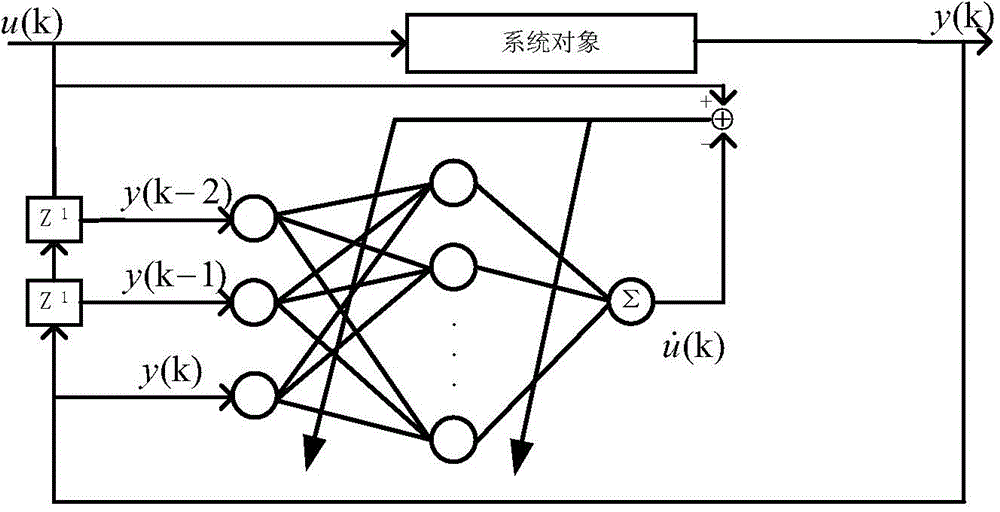
[0014] The system identifier and the inverse system controller in the case of the ideal system model of the rotor UAV are established, so that the system identifier reflects the input-output relationship of the ideal system model, and the inverse system controller reflects the input-output relationship of the ideal inverse system model. When the target signal value is input to such as figure 1 In the control system shown in the figure, due to external disturbances, load changes, etc., the system model output and the target output have errors, and the feedback correction of the system identifier and inverse system controller through the adaptive algorithm has made the control system more sensitive to external disturbances and loads. Variations are robust. In the present invention, the function of the system identifier is to establish a mappin...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap