

Modularization mechanical arm joint with variable freedom
A degree of freedom and modular technology, applied in the field of robotic arms, can solve problems such as poor flexibility, inability to complete combination and replacement of joints, and different structural forms of joints, etc., to achieve cost reduction, compact overall structure design, and convenient internal wiring Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described in detail below in conjunction with the accompanying drawings.
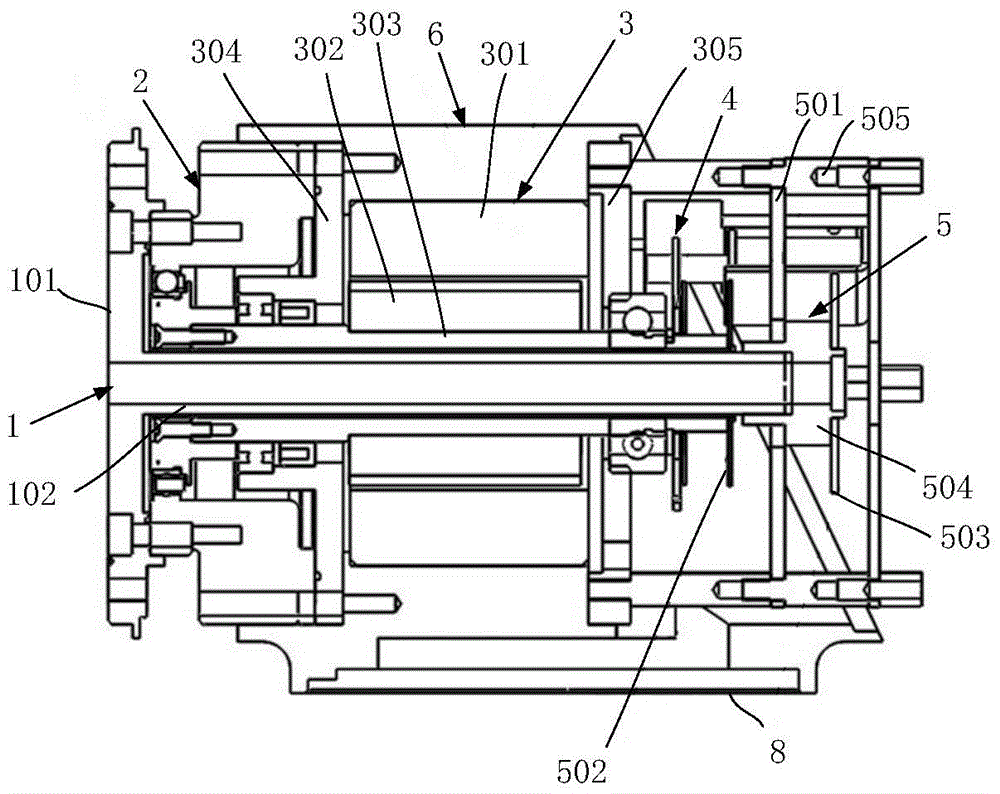
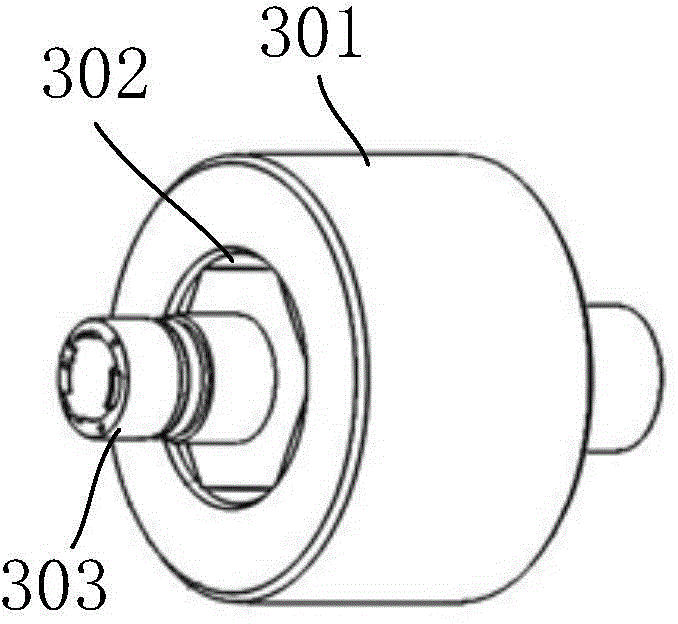
[0041] The modular mechanical arm joint with variable degrees of freedom of the present invention includes an output flange shaft 1, a harmonic reducer 2, a hollow shaft motor 3, a brake device 4, a double code disc positioning mechanism 5 and a housing 6, such as figure 1 shown.
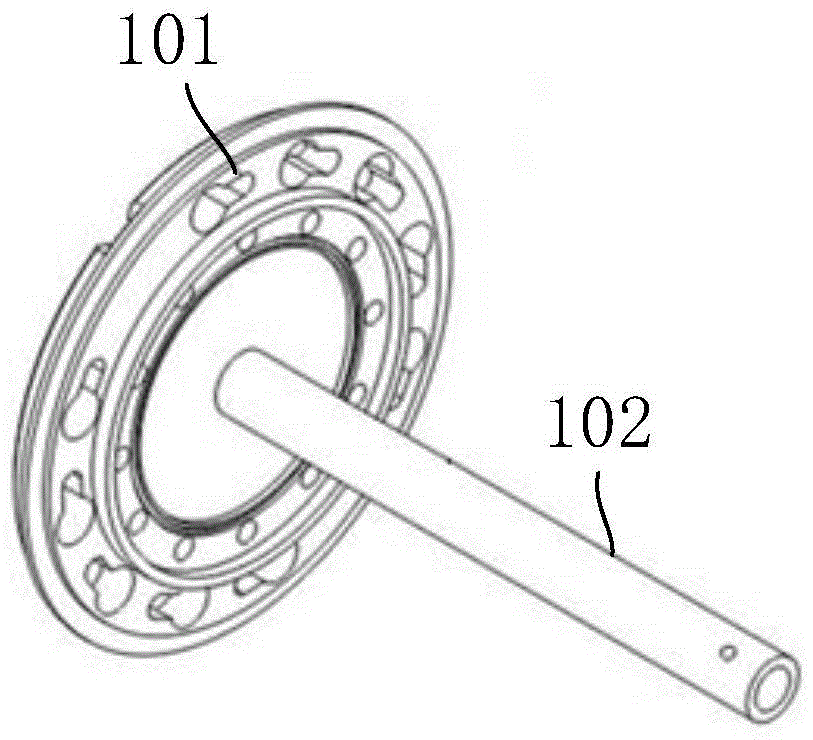
[0042] The output flange shaft 1 is an integral structure composed of two parts, the output flange 101 and the output shaft 102, such as figure 2 As shown, the output flange 101 is coaxially connected with the front end of the output shaft 102 . Wherein, the output shaft 102 is coaxially sleeved with a harmonic reducer 2 , a hollow shaft motor 3 , a braking device 4 and a double-code disc positioning mechanism 5 sequentially from front to back. The above-mentioned harmonic reducer 2, hollow shaft motor 3, braking device 4, and double code disc positioning mechanism 5 are all loc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More