

Independent-following vehicle course control device and control method
A technology of heading control and control method, which is applied in the direction of automatic steering control components, vehicle components, steering mechanisms, etc., can solve the problems of less research, complex structure, high cost, etc., and achieve low cost, simple structure, stable and reliable self-following Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
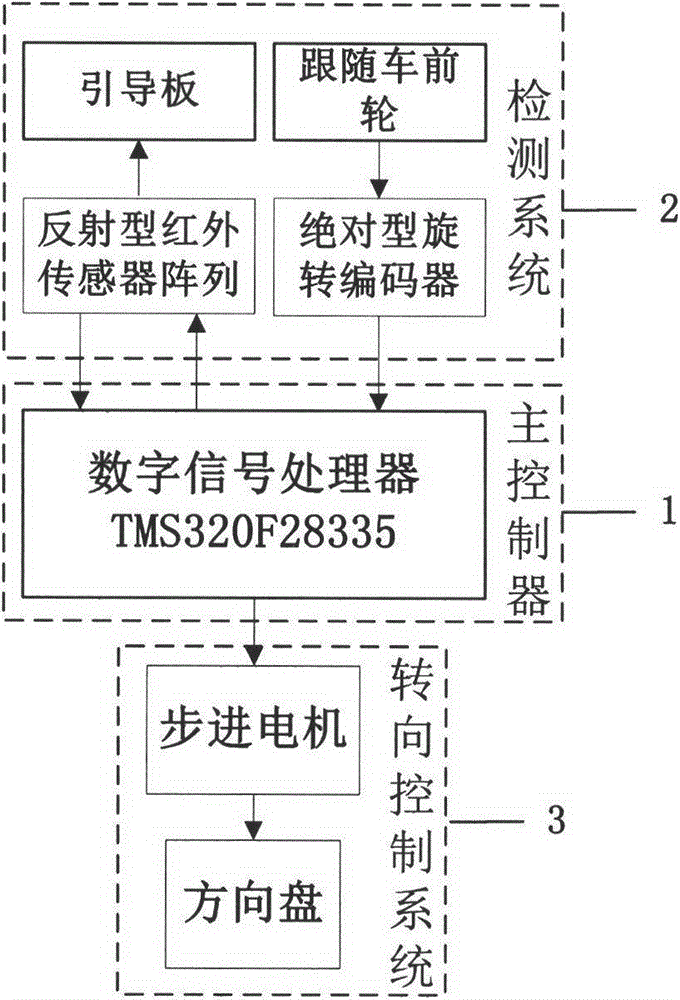
[0027] An autonomous following vehicle heading control device and control method, the control system hardware structure is formed by a main controller 1, a detection system 2 and a steering control system 3 (such as figure 1 ), followed by the model establishment of the following control system, the design of the controller of the following control system and the design of the following control algorithm.
[0028] The present invention will be further described below in conjunction with accompanying drawings and implementation.
[0029] (1) Specific implementation plan of the detection system
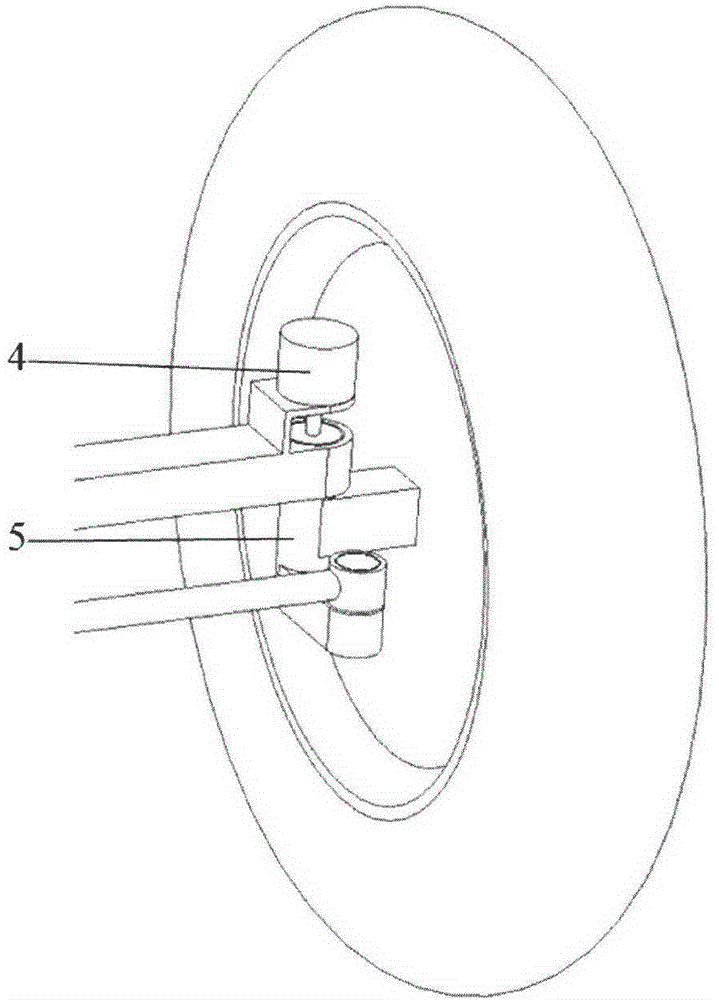
[0030] Front wheel angle detection mechanism (such as figure 2 ) in the absolute rotary encoder 4, the voltage output range is 0-5v, and the corresponding measurement angle is 0-360°, the output voltage of the absolute rotary encoder 4 is collected through the AD module of the main controller 1, and it can be known through calculation Front wheel steering angle δ.
[0031] Relative ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More