

Method for achieving automatic navigation of vehicle based on self-adaptive filtering algorithm
An adaptive filtering and automatic navigation technology, applied in the field of navigation, can solve the problems of fixed parameters, phase lag, and low sensitivity, and achieve the effect of eliminating swing and jitter, accurate reflection, and wide application range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] In order to describe the technical content of the present invention more clearly, further description will be given below in conjunction with specific embodiments.
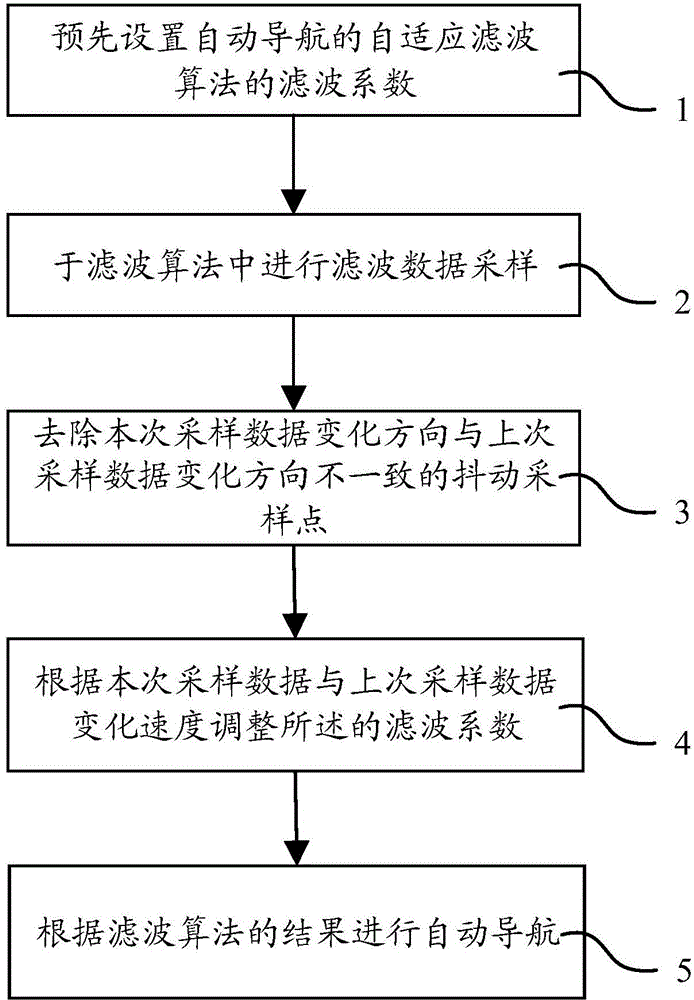
[0042] The filtering algorithm proposed in this patent has the following characteristics:
[0043] 1. When the data changes rapidly, the filtering results can be followed up in time (sensitivity priority); and the faster the data changes, the higher the sensitivity should be.
[0044] 2. When the data tends to be stable and oscillates up and down at a fixed point, the filtering result can tend to be stable (smoothness priority);
[0045] 3. When the data is stable, the filtering result can be close to and finally equal to the sampling data. (to eliminate errors caused by rounding off decimals).
[0046] Such as figure 1 As shown, in order to achieve the above-mentioned purpose of the invention, the method for realizing automatic vehicle navigation based on adaptive filtering algorithm of the present inve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More