

Automatic navigation system based on camera detection, control method of system and vertical balance car
A technology of automatic navigation and control methods, which is applied in two-dimensional position/channel control and other directions, and can solve problems such as insufficient safety, low calculation accuracy, and low control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
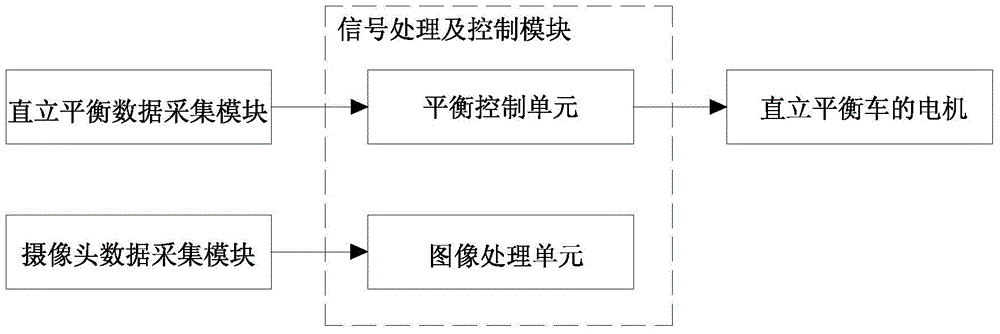
[0060] Such as figure 1 As shown, the automatic navigation system of the present embodiment includes an upright balance data acquisition module, a camera data acquisition module, and a signal processing and control module, and the upright balance data acquisition module and the camera data acquisition module are respectively connected with the signal processing and control module;
[0061] The upright balance data acquisition module is used to obtain the current attitude angle data of the upright balance car through the data collected by the IMU sensor;
[0062] The camera data acquisition module is used to collect the grayscale image data of the runway through the camera sensor;
[0063] The signal processing and control module is used to collect, store and process the grayscale image data of the runway, the current attitude angle data of the upright balance car, the current speed and differential speed data of the upright balance car through an embedded computer, and accordi...
Embodiment 2
[0134] This embodiment is an application example, and the automatic navigation system of the above-mentioned embodiment 1 is applied to an upright balance car.
[0135] Such as Figure 8 As shown, the upright balancing car includes a car body 1, a left wheel 2, a right wheel 3, a motor (not shown in the figure) and an automatic navigation system, and the left wheel 2 and the right wheel 3 are arranged at the bottom of the car body 1 On both sides, the motor drives the left wheel 2 and the right wheel 3 to move; wherein, the IMU sensor 4 and the embedded computer 5 are arranged in the car body 1, the camera sensor 6 is arranged on the top of the car body 1, and the embedded The computer 5 is connected with the motor.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More