

Control system of electric self-balance wheelbarrow and control method thereof
A control system and self-balancing technology, applied in the direction of single motor speed/torque control, vehicle components, rider drive, etc., can solve the problems of poor control stability and reliability, poor stability and reliability, and weak data processing capabilities of the main control chip and other issues, to achieve the effect of enriching the internal and external resources of the chip, stable and reliable control, and powerful digital computing capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
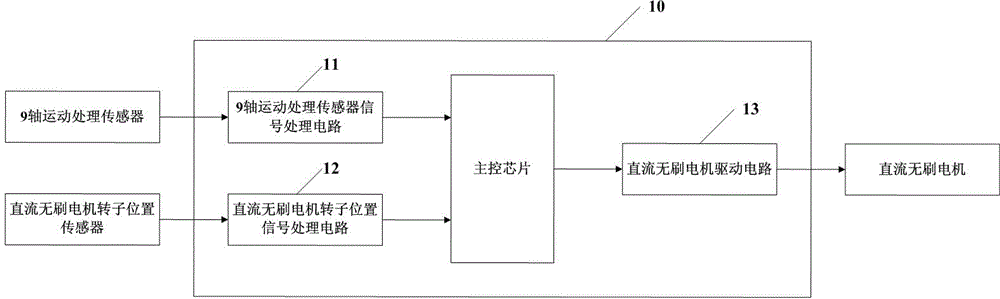
[0027] like figure 1 As shown, a control system of an electric self-balancing unicycle, including a 9-axis motion processing sensor for collecting angular velocity signals and acceleration signals, a DC brushless motor rotor position sensor for collecting DC brushless motor rotor position signals, and a control unit 10 and the DC brushless motor, the output terminals of the 9-axis motion processing sensor and the DC brushless motor rotor position sensor are all connected to the input terminal of the control unit 10, and the output terminal of the control unit 10 is connected to the input terminal of the DC brushless motor. The brushless motor outputs a torque signal to drive the wheel to rotate.
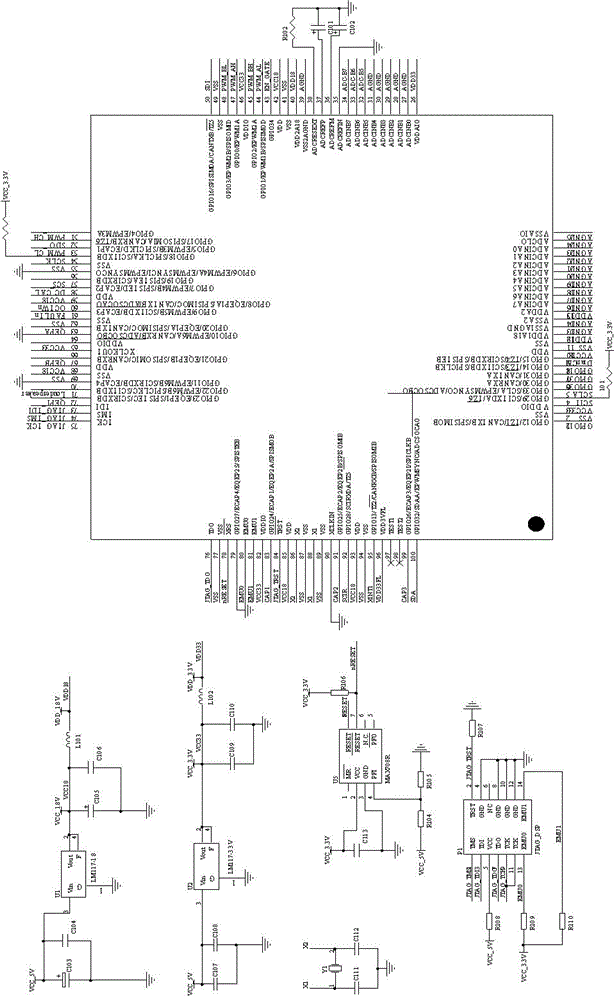
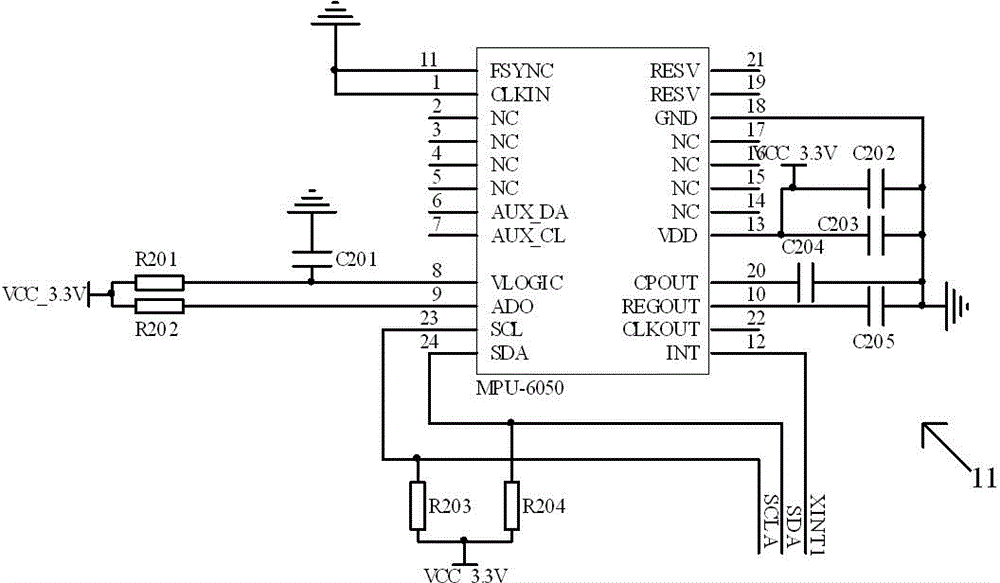
[0028] like figure 1 , 2 As shown, the control unit 10 is composed of a 9-axis motion processing sensor signal processing circuit 11, a brushless DC motor rotor position signal processing circuit 12, a main control chip and a brushless DC motor drive circuit 13, and the 9-axis moti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More