

Cantilever beam vibration control method based on back-stepping fuzzy sliding mode control
A fuzzy sliding mode control and cantilever beam technology, applied in the control of cantilever beams, cantilever beam vibration control based on inversion fuzzy sliding mode control, can solve the problems of low robustness, system instability, inconvenience, etc. The effect of global stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0083] Below in conjunction with accompanying drawing of description, the present invention will be further described.
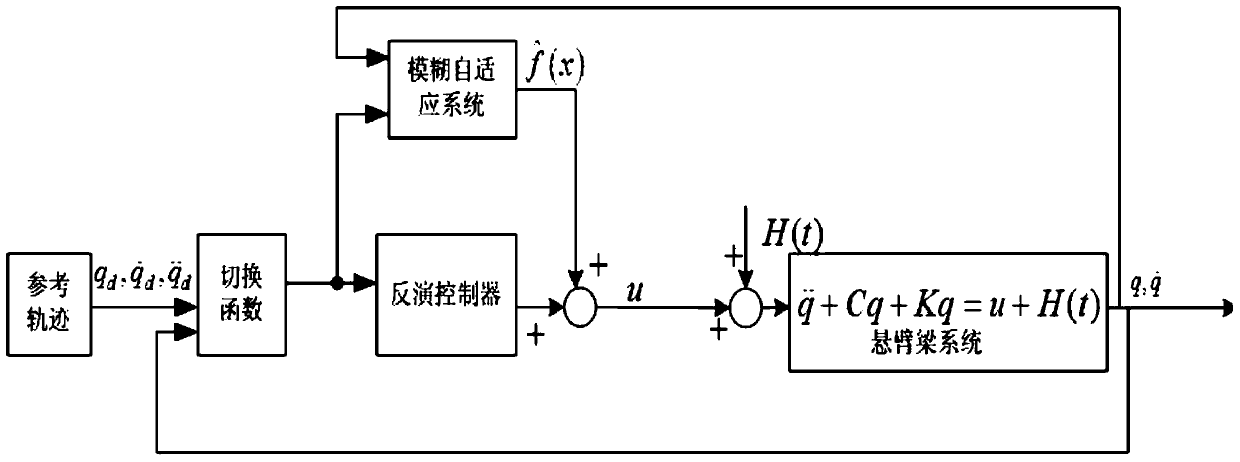
[0084] like figure 1 The vibration control principle diagram of the shown cantilever beam system, the present invention provides a kind of cantilever beam vibration control method based on inverse fuzzy sliding mode control, comprising the following steps:
[0085] 1) Establish a dynamic cantilever beam mathematical model and convert the cantilever beam mathematical model;
[0086] The mathematical model of the dynamic cantilever beam is
[0087] q · · + C q · + Kq = u - - - ( 1 )
[0088] Among them, C is the damping term, K is the frequency term, q is the vibration trajectory of the cantilever beam, and u is the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More