

Constraining control method for under-actuated system
A control method and underactuated technology, applied in general control systems, control/regulation systems, adaptive control, etc., can solve problems such as inability to guarantee system transient performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0104] Further illustrate the present invention below in conjunction with accompanying drawing.
[0105] The underactuated control method with constraints provided by the present invention is implemented as follows:
[0106] 1. Determine the underactuated model and control target
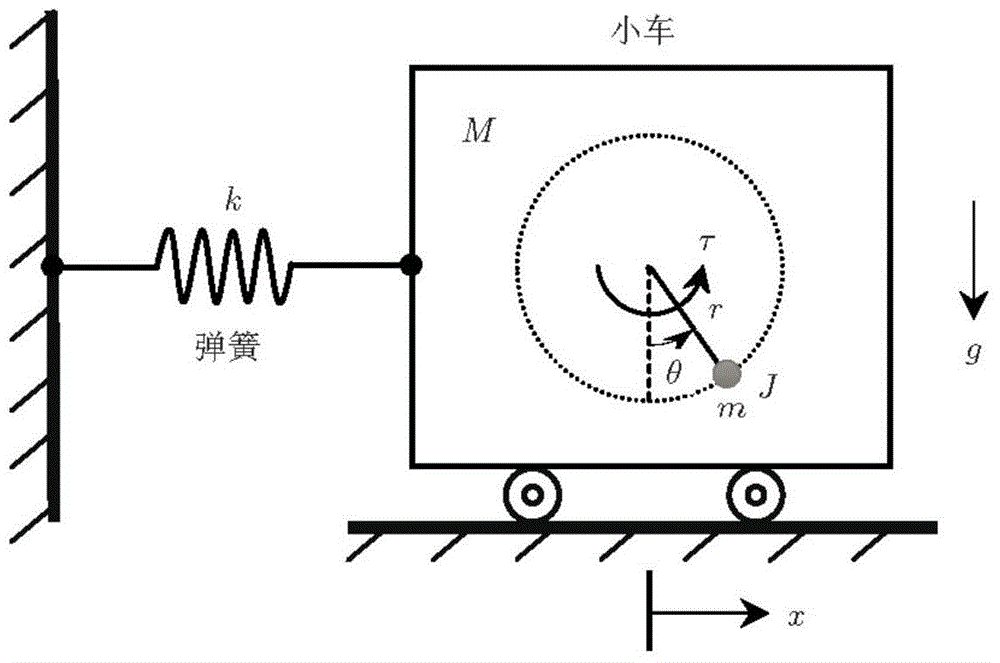
[0107] For attached figure 1 The underactuated system model in , considering the underactuated TORA system with the rotating ball rotating in the vertical plane, its dynamic characteristics can be described by the following equation:
[0108] M ( q ) q ·· + V ( q , q · ) q · + G ( q ) = u
[0109] where, q(t)=[x(t) θ(t)] T represents the state vector of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More