

3D (three-dimensional) sight direction estimation method for robot interaction object detection
A technology of interactive objects and line-of-sight direction, applied in the acquisition, instrumentation, calculation and other directions of 3D object measurement, which can solve the problems of lack of robustness and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the following description.
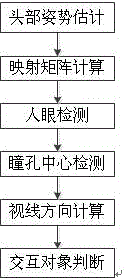
[0069] Such as figure 1 As shown, a 3D gaze direction estimation method for robot interactive object detection, it includes the following steps:
[0070] S1. Perform head pose estimation: use RGBD sensors to collect color information and depth information, and calculate the three-dimensional position information T and head pose R of the head according to the collected information;
[0071] S2. Calculate the mapping matrix M between the head pose R and the head reference pose R0, where the head reference pose R0 is the head pose when the user and the robot face each other, R0=[0,0,1] ;
[0072] S3. Collect the human eye picture, and extract the human eye area image from the collected human eye picture;
[0073] S4. After obtaining the ima...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More