

Path planning method of surface array salient point on-demand jet printing control system
A jet printing and control system technology, applied in the direction of digital control, electrical program control, etc., can solve problems such as low efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
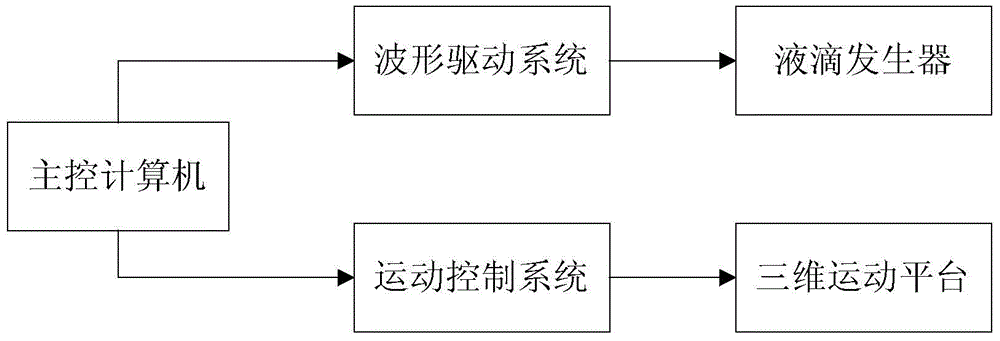
[0034] This embodiment also provides an area array bump printing system, the area array bump printing system includes a main control computer, a waveform drive system, a droplet generator, a motion control system and a three-dimensional motion platform;
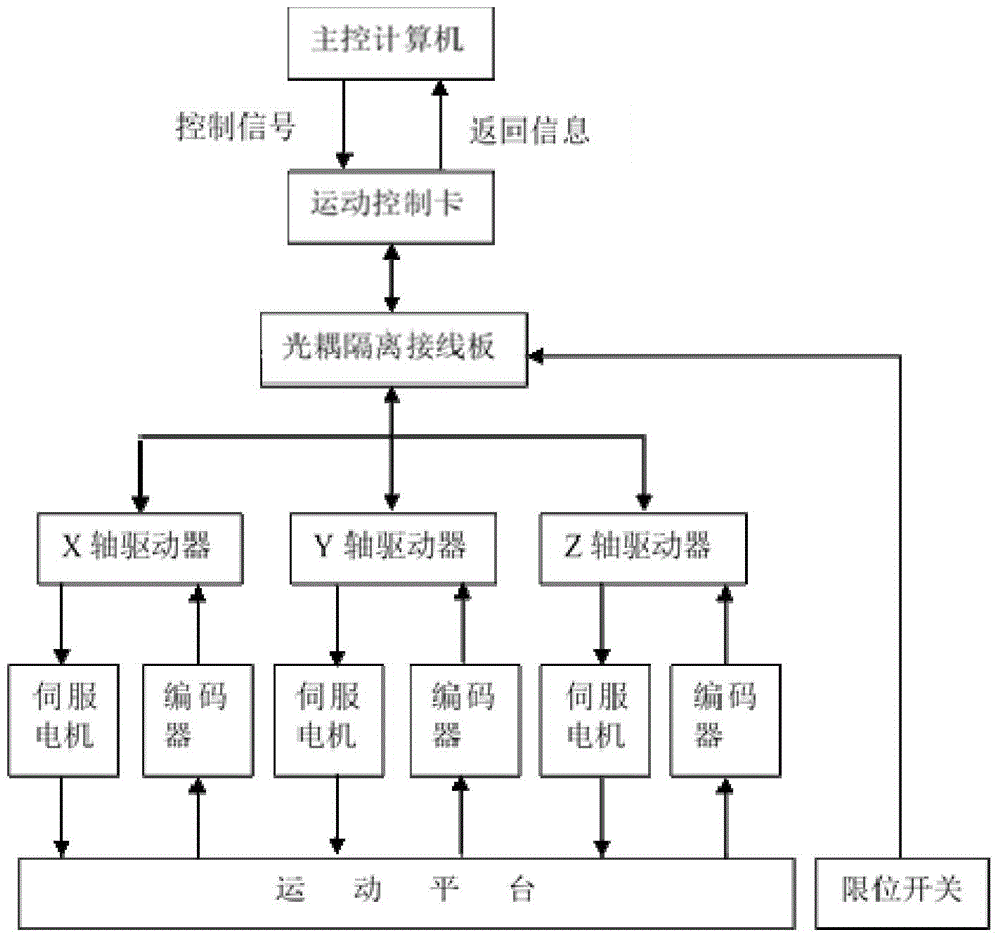
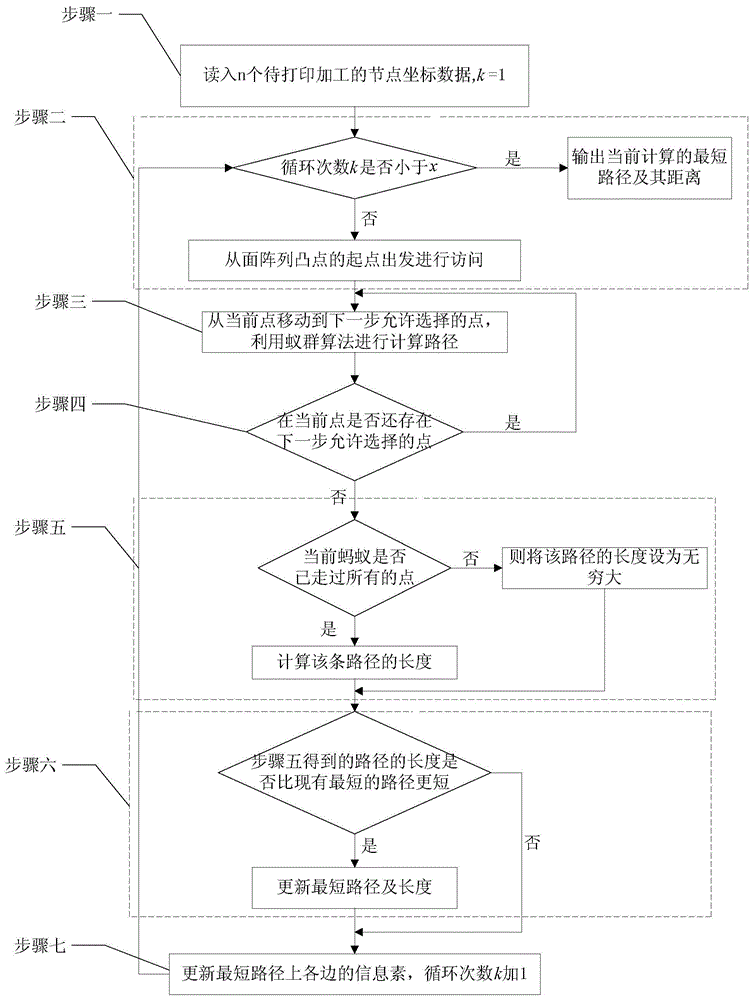
[0035] After the surface array bump drop-on-demand printing program in the main control computer starts, it will first read all the data in the user coordinate file, perform path planning processing to form a new coordinate file, and then read the data in the new coordinate file sequentially Point the coordinates and drive the three-dimensional motion platform to move through the motion control system to judge whether it has reached the end point, and end the program after reaching the end point, otherwise it will move according to the difference of the coordinates. At the same time, the droplet generator is controlled by the waveform drive system, and the coordinated control of the two systems is carried out to realize the ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More