

Electric vehicle asynchronous motor fuzzy adaptive dynamic surface control method with consideration of iron loss
A technology of fuzzy self-adaptive and dynamic surface control, applied in motor generator control, electronic commutation motor control, control system, etc., can solve problems such as computational explosion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0138] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
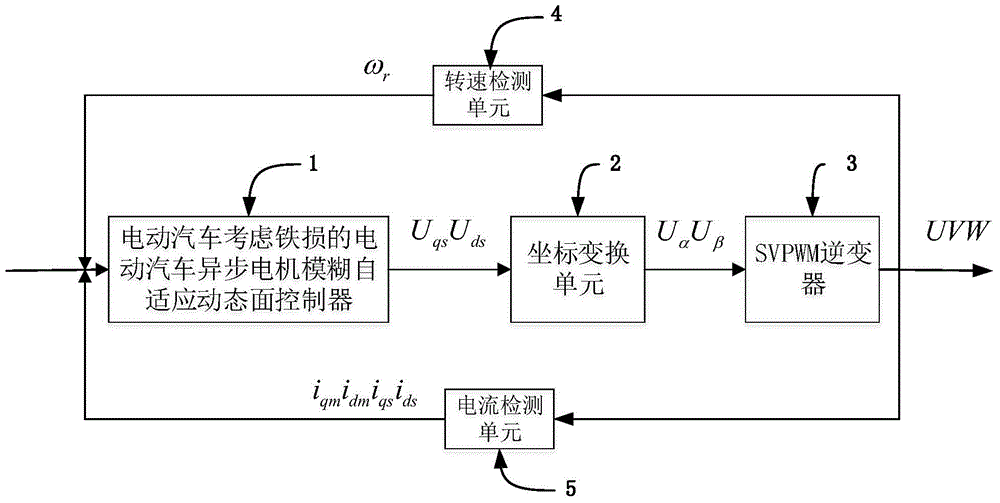
[0139] to combine figure 1 As shown, the electric vehicle asynchronous motor fuzzy adaptive dynamic surface controller considering iron loss mainly includes asynchronous motor fuzzy adaptive dynamic surface controller 1, coordinate transformation unit 2, SVPWM inverter 3, speed detection unit 4 and current detection unit Unit 5. The speed detection unit 4 and the current detection unit 5 are mainly used to detect the current value and speed-related variables of the asynchronous motor. The actual measured current and speed variables are used as input, and the voltage is controlled by the fuzzy adaptive dynamic surface controller 1 of the asynchronous motor, and finally Converted to three-phase electricity to control the speed of the asynchronous motor. In order to design a more effective controller, it is necessary to establish a dynamic model ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More