

Upper limb rehabilitation robot rehabilitation training motion control method
A rehabilitation robot and rehabilitation training technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of "chattering, difficult to guarantee real-time performance, large amount of calculation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0199] A motion control method for upper limb rehabilitation robot rehabilitation training with excellent technical effect, which mainly considers the uncertain factors in the upper limb rehabilitation robot model and the tracking error caused by repetitive motion, which will affect the stability and tracking accuracy of the system. According to the training of upper limb rehabilitation robot In this way, aiming at uncertain factors such as arm active force and time-varying torque in the upper limb rehabilitation robot model, an intelligent control method that can not only ensure the training accuracy of the upper limb rehabilitation robot but also maintain the stability of the system, so that the upper limb rehabilitation robot can be stable Efficiently complete the rehabilitation training for stroke patients with upper limb hemiplegia.
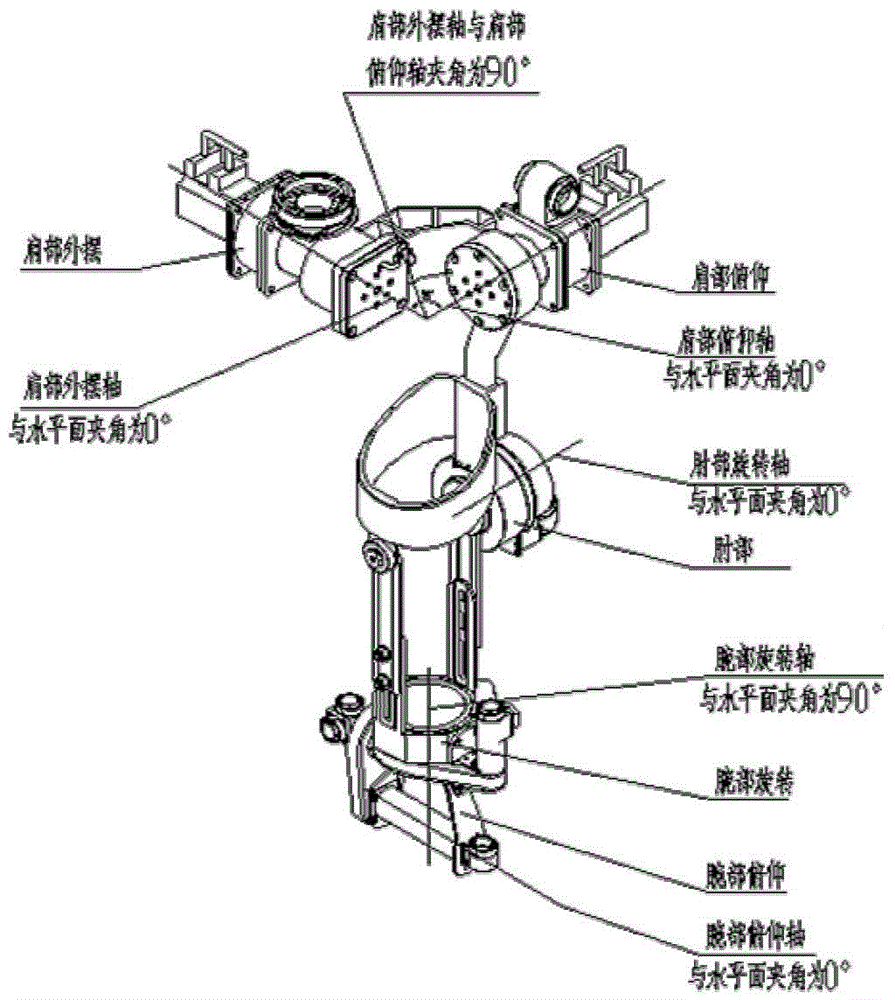
[0200] The technical basis is explained as follows: The overall structure of the 5-DOF upper limb rehabilitation robot can be found in fig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More