

Vegetable and fruit picking robot and control method thereof
The technology of a picking robot and a control method is applied in the field of vegetable and fruit picking robots, and the fields of vegetable and fruit picking robots and their control, which can solve problems such as low work efficiency, single picking types, and heavy labor, and achieve avoiding damage to fruits, high picking efficiency, and stretching wide range of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be described in detail below in combination with specific embodiments.
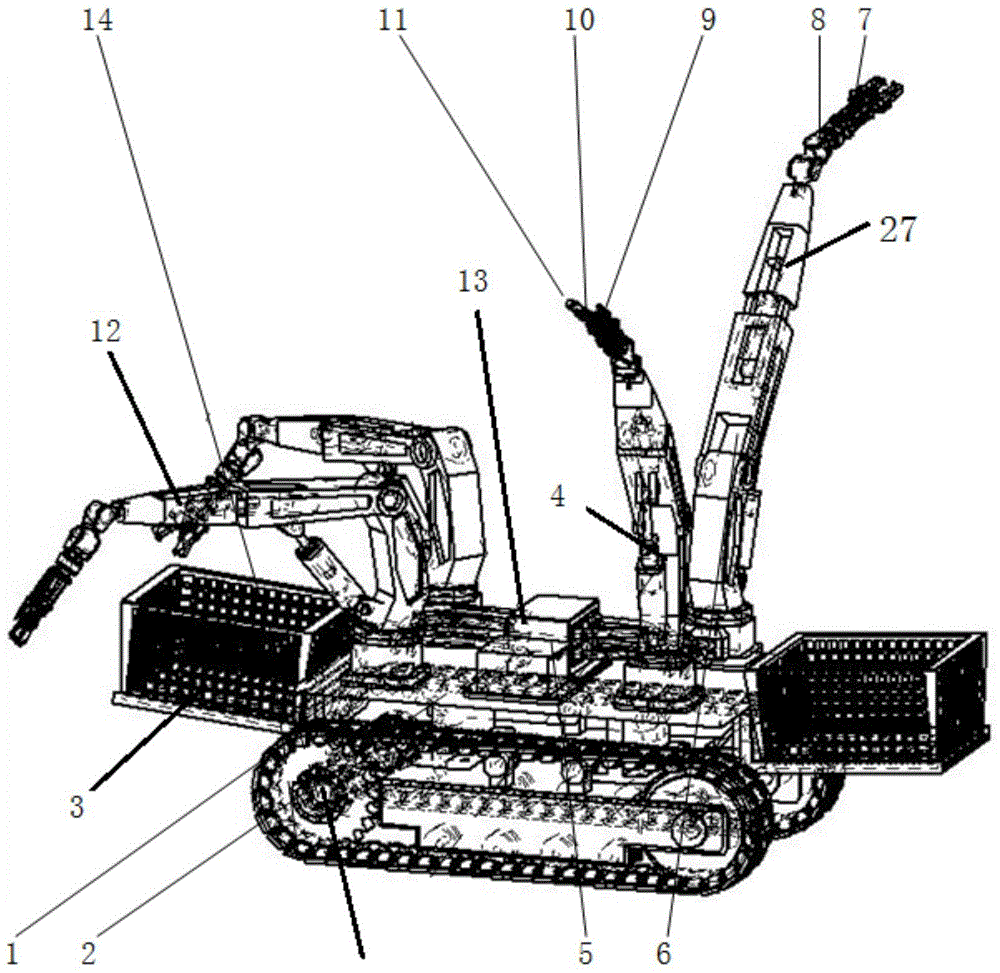
[0029] The invention provides a vegetable and fruit picking robot and its control method, such as figure 1 As shown, including crawler 1, crawler 1 is provided with base 2, both ends of base 2 are provided with storage basket 3, and base 2 is provided with actuator 4, identification system 30, first driving mechanism 7, second The driving mechanism 14 and the controller 5 are respectively connected to the identification system 30 , the first driving mechanism 7 and the second driving mechanism 14 through wires.
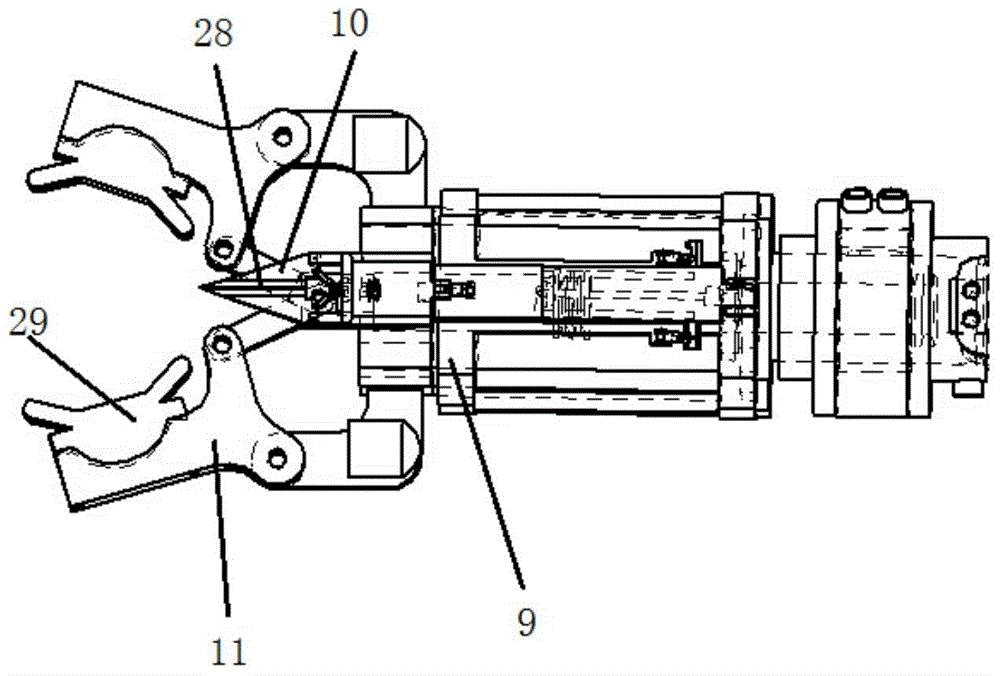
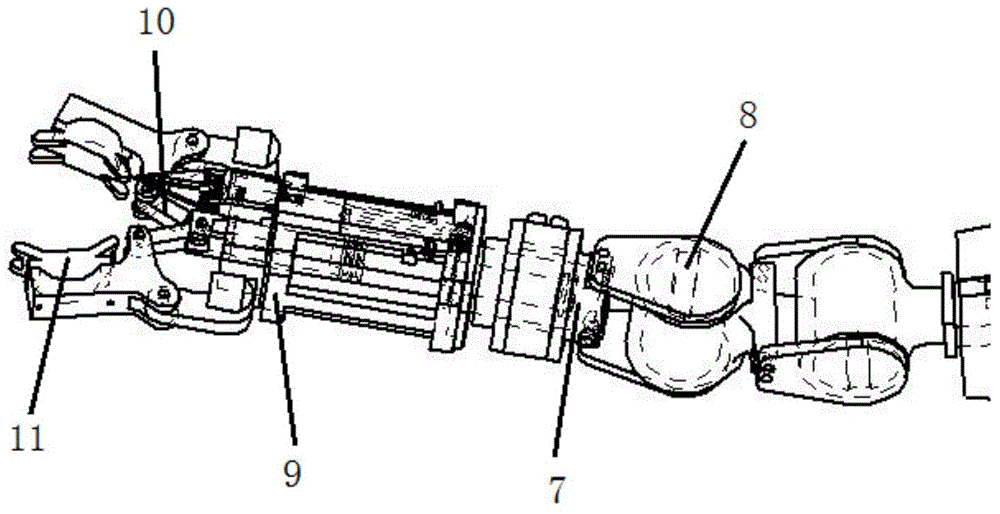
[0030] Wherein, the actuator 4 includes a mechanical arm 6, a small arm 27, a wrist 8 and a finger 9 connected in sequence, and the mechanical arm 6 is movably connected with the base 2, as figure 2 and 3 As shown, the finger 9 includes scissors 10 and a clamping mechanism 11; the front end of the scissors 10 is a scissor blade 28, the rear end of the scissors...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More