

Self-adaption Kalman filtering method for autonomous navigation positioning of pedestrians
An adaptive Kalman and autonomous navigation technology, applied in the field of navigation and positioning, can solve the problems of real-time noise changes and real-time deterioration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be further described below in conjunction with accompanying drawing and specific embodiment:
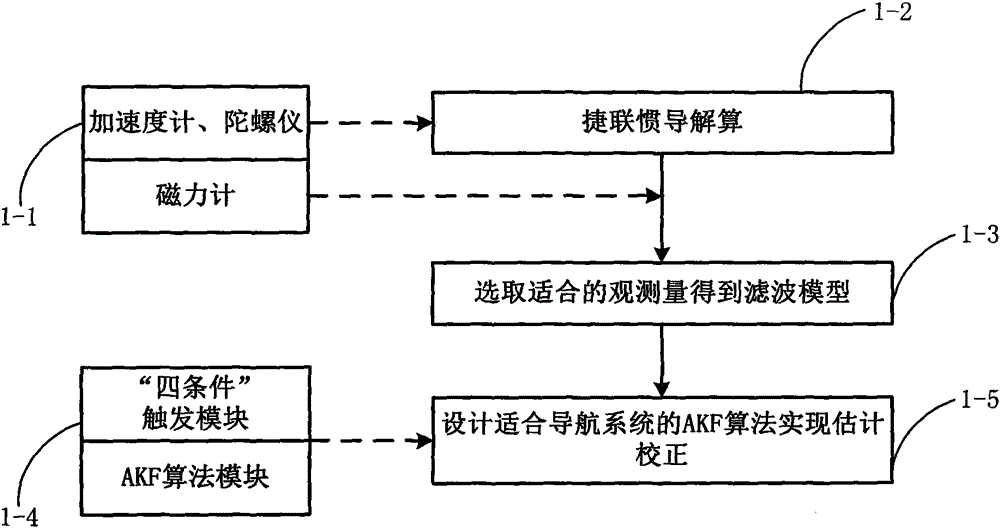
[0044] figure 1 It is a flow chart of the present invention, wherein the IMU module (1-1) of data acquisition includes an accelerometer, a gyroscope and a magnetometer. The data is subjected to strapdown inertial navigation calculation (1-2), and then the filtering model (1-3) is obtained by selecting appropriate observations, and then the "four conditions" are used to trigger the AKF module (1-4) for filtering. During normal movement, the human body is in contact with the ground for milliseconds or longer. At a certain moment, the human body will reach an instantaneous static state when it contacts the ground. When the "four conditions" are met at the same time, it will be an instantaneous static state. AKF refers to adaptive Kalman filter. The AKF module realizes real-time estimation of system noise and statistical characteristics of observation n...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More