

A full-order sliding mode control method for manipulator servo system based on extended state observer
A technology of a servo system and a control method, applied in the directions of adaptive control, general control system, control/regulation system, etc., can solve the problems of high controller gain, affecting system positioning accuracy and tracking performance, system damage, etc. Rod, achieve precise tracking control, eliminate chattering problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be further described below in conjunction with the accompanying drawings.
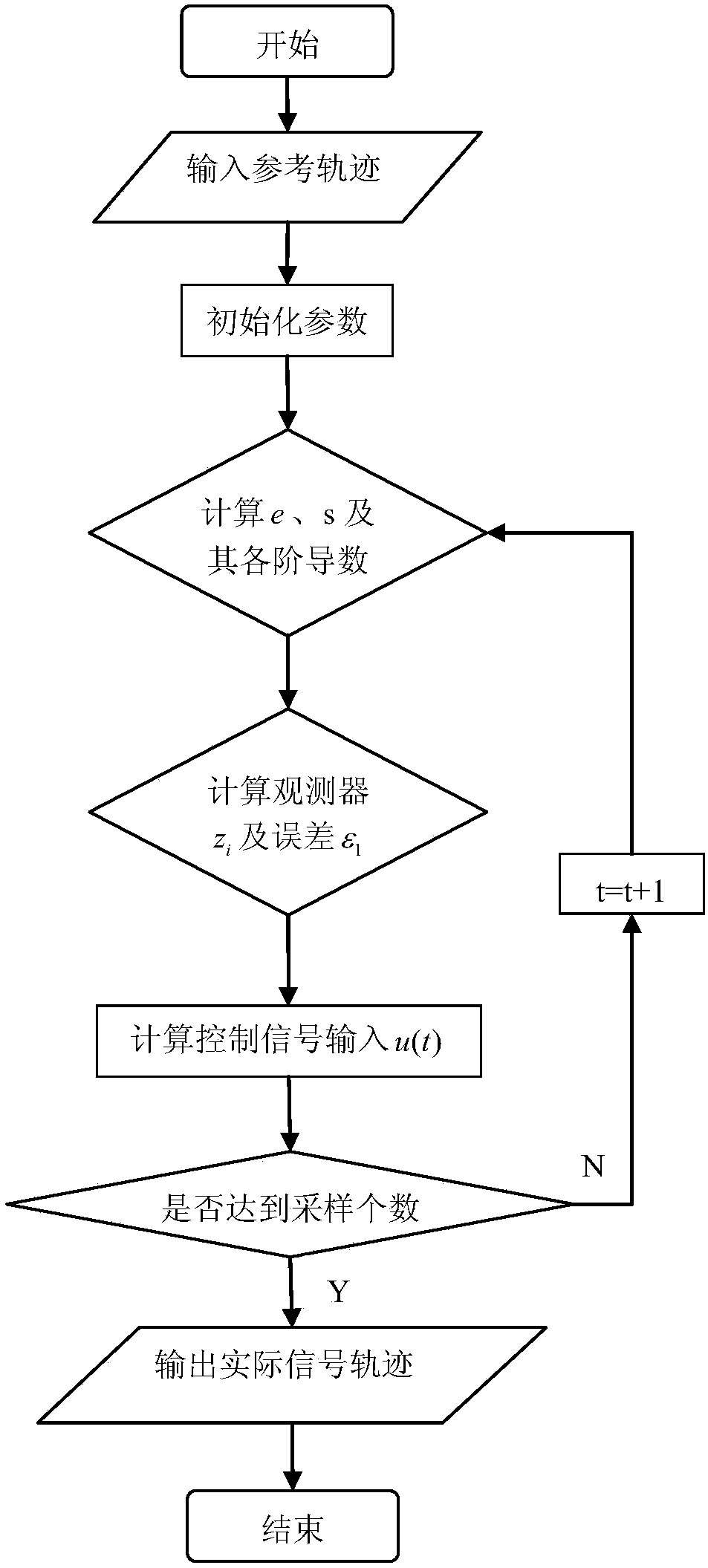
[0056] refer to figure 1 - Figure 9, a method for full-order sliding mode control of a manipulator servo system based on an extended state observer, including the following steps:
[0057] Step 1, establish the servo system model of the manipulator, initialize the system state and control parameters;
[0058] 1.1, the servo system model of the manipulator is expressed in the following form
[0059]
[0060] where q 1 ,q 2 is the rotation angle of the connecting rod and the motor; I is the inertia link of the connecting rod; J is the moment of inertia of the motor; K is the stiffness of the spring; u is the input torque; M and L represent the quality and length of the connecting rod respectively; y=q 1 is the output of the system;
[0061] 1.2, define the state variable x 1 =q 1 , x 3 =q 2 , Then the servo system equation can be written in the following ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More