

Automatic alignment method and device for unmanned plane
An automatic sensing and alignment device technology, applied in the electronic field, to achieve the effect of improving accuracy and reducing range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
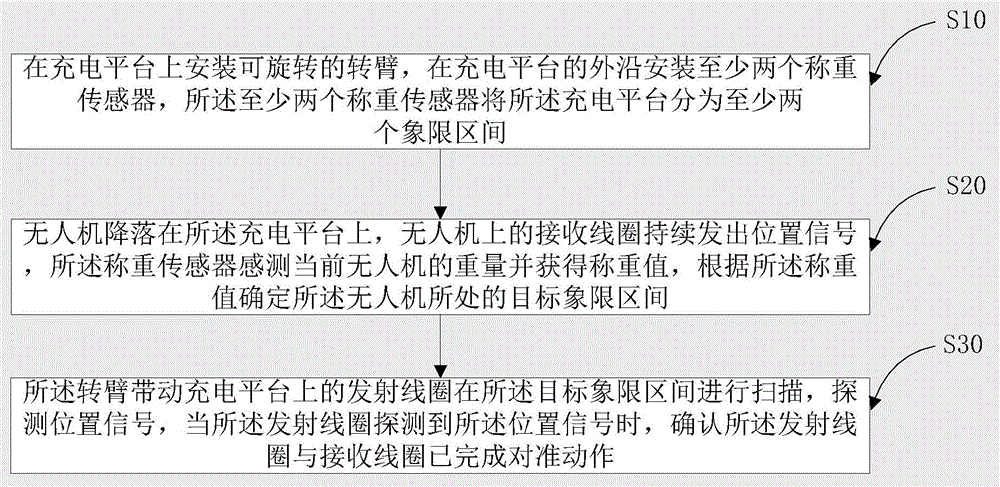
[0050] figure 1 It is a flow chart of a UAV automatic sensing alignment method provided in Embodiment 1 of the present invention.
[0051] An automatic induction alignment method for drones, which is suitable for wireless charging of drones. The charging coil includes a transmitting coil arranged on a charging platform and a receiving coil arranged on the drone, including:
[0052] S10. Install a rotatable arm on the charging platform, install at least two load cells on the outer edge of the charging platform, and at least two load cells divide the charging platform into at least two quadrants;
[0053] S20. The UAV lands on the charging platform, the receiving coil on the UAV continuously sends out position signals, the weighing sensor senses the current weight of the UAV and obtains the weighing value, and determines the position of the UAV according to the weighing value. Target quadrant interval;
[0054] S30. The rotating arm drives the transmitting coil on the charging...
Embodiment 2
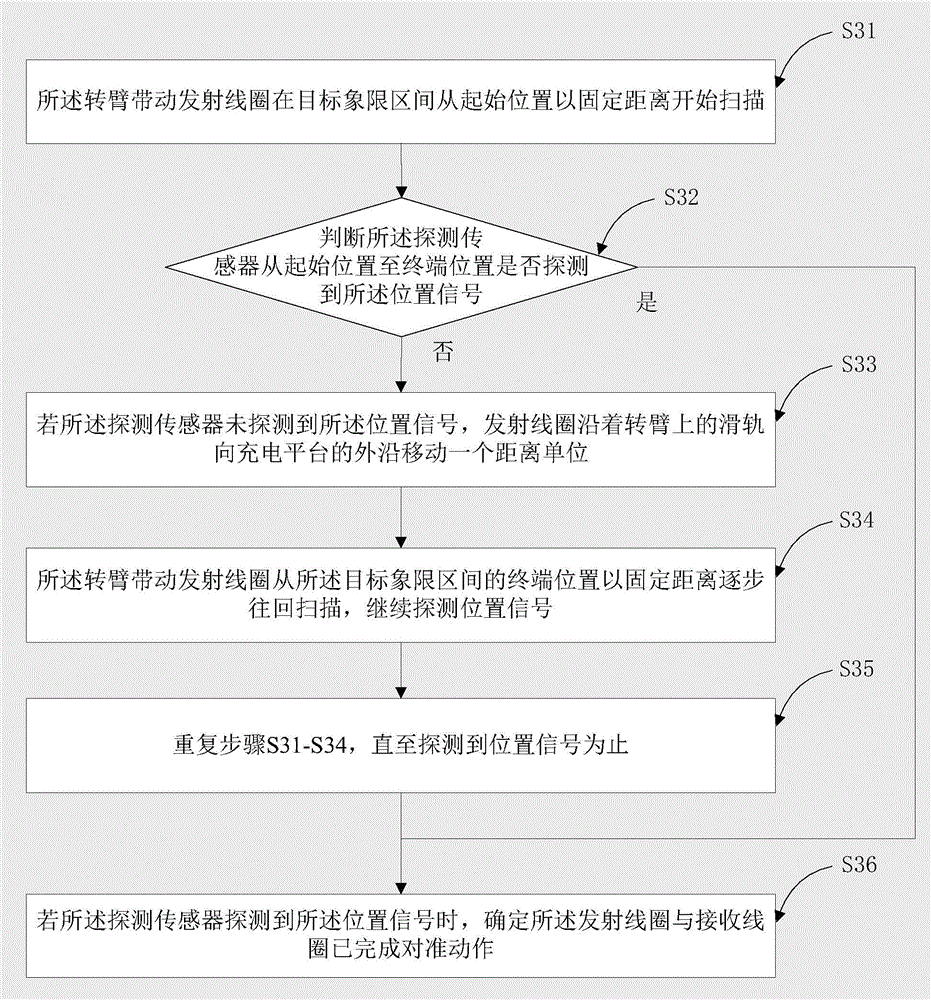
[0060] Such as figure 2 As shown, in this embodiment, step S30 includes:
[0061] S31. The rotating arm drives the transmitting coil to scan from the starting position at a fixed distance in the target quadrant;
[0062] In this embodiment, the target quadrant is a fan-shaped area, and the two sides of the fan-shaped area are respectively defined as the starting position and the terminal position, and the two are only relative.
[0063] S32. Judging whether the detection sensor has detected the position signal from the initial position to the terminal position;
[0064] S33. If the detection sensor does not detect the position signal, the transmitting coil moves along the sliding rail on the rotating arm to the outer edge of the charging platform for a distance unit;
[0065] S34. The rotating arm drives the transmitting coil to scan back step by step at a fixed distance from the terminal position of the target quadrant, and continue to detect position signals;
[0066] S3...
Embodiment 3
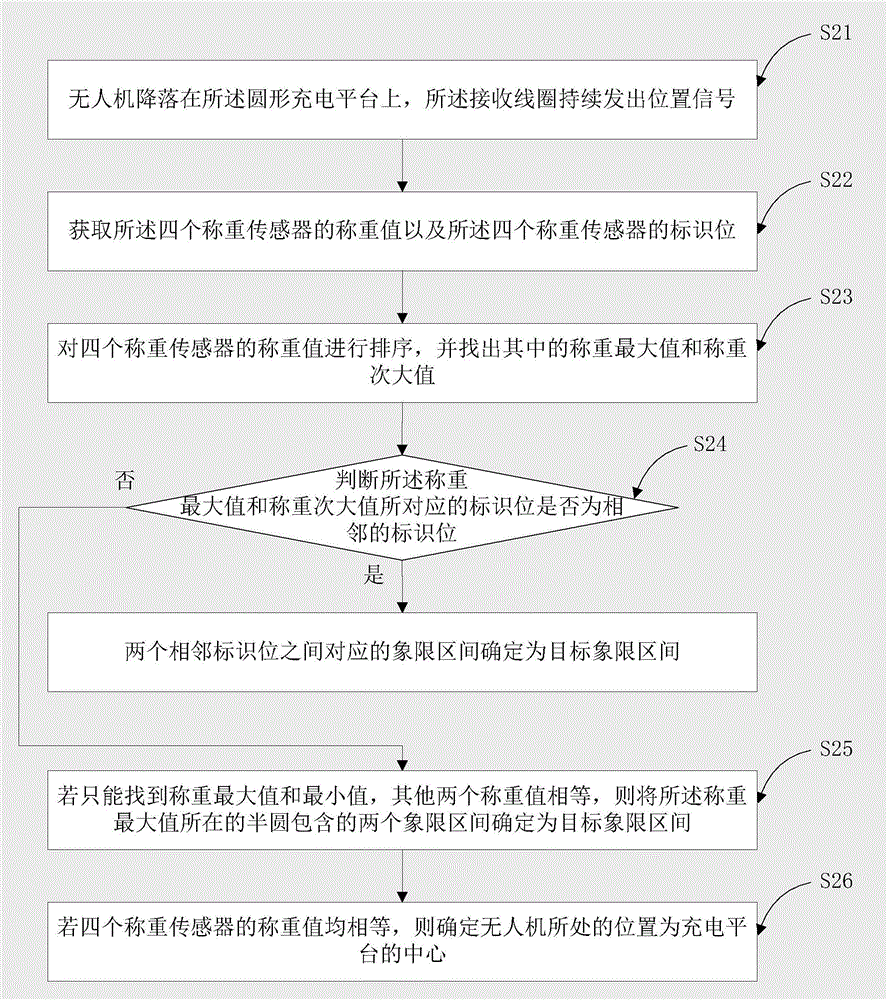
[0072] Such as image 3 As shown, in this embodiment, the number of load cells is four, and accordingly, step S20 includes:
[0073] S21. The drone lands on the charging platform, and the receiving coil continuously sends out position signals;
[0074] S22. Obtain the weighing values of the four load cells and the identification bits of the four load cells;
[0075] S23. Sorting the weighing values of the four load cells, and finding out the maximum weighing value and the second maximum weighing value;
[0076] S24, judge whether the identification bit corresponding to the weighing maximum value and the weighing second maximum value is an adjacent identification position, if so, the quadrant interval corresponding between the two adjacent identification positions is determined to be the target quadrant interval; if not, Then enter the following steps:
[0077] S25. If only the maximum weighing value and the minimum value can be found, and the other two weighing values ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More