

Five-degree-of-freedom welding cutting robot
A technology of cutting robot and degree of freedom, applied in the direction of welding/cutting auxiliary equipment, welding equipment, auxiliary welding equipment, etc., to achieve the effect of wide application range and simple operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
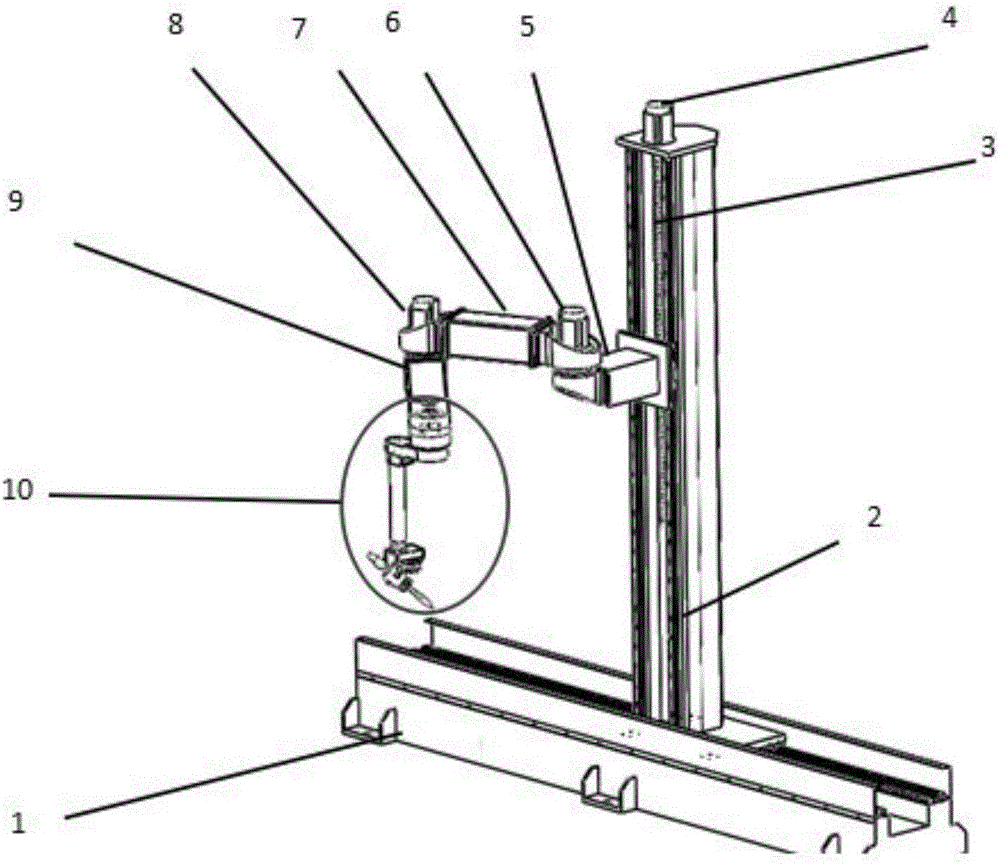
[0031] Such as figure 1 As shown, it is a schematic structural diagram of a five-degree-of-freedom welding and cutting robot provided by the present invention in a side-mounted manner. The welding and cutting robot includes a bed 1 with guide rails, a column 2 with a ball screw mechanism 3 and a robot body. The column 2 is installed on the guide rail of the bed 1 and can move horizontally along the guide rail for long-distance welding and cutting operations; the robot body is connected with the ball screw mechanism 3 and can move up and down along the ball screw mechanism 3 for vertical Adjustment of direction welding operation. Wherein, the ball screw mechanism 3 is driven by the first servo motor 4 . The robot body comprises a rear swing arm seat 5, a rear swing arm 7, a front swing arm 9 and a head assembly assembly 10; one end of the rea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More