

Application method of robot in surface treatment production
A surface treatment and application method technology, applied in the direction of manipulator, anodic oxidation, electrolysis process, etc., can solve the problems of many auxiliary mechanisms, insufficient manpower, slow running speed, etc., and achieve fast response speed, diversified actions, and shortened cycle Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The technical solution in the embodiment will be specifically, clearly and completely described below in conjunction with the drawings in the embodiment.
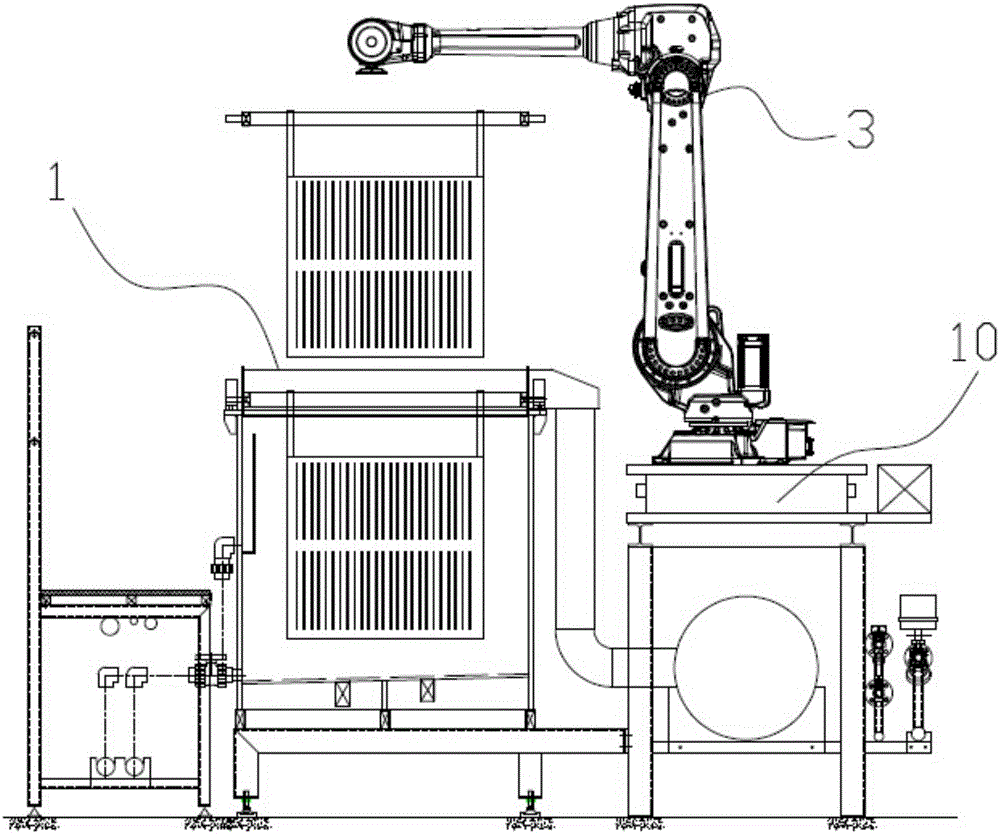
[0035] see image 3 Shown is a schematic diagram of the application state of the robot of the present invention in surface treatment production. The method comprises the steps of:
[0036] A movable robot 3 and its control system are provided. The robot 3 is placed on the robot track 10 of the surface treatment equipment 1. Through the control system, the robot 3 is controlled to perform various actions of the plated parts in each process. Specifically, the actions to be performed by the robot include lifting, walking, tilting, rotating, swinging and automatic opening and closing of the drum cover.
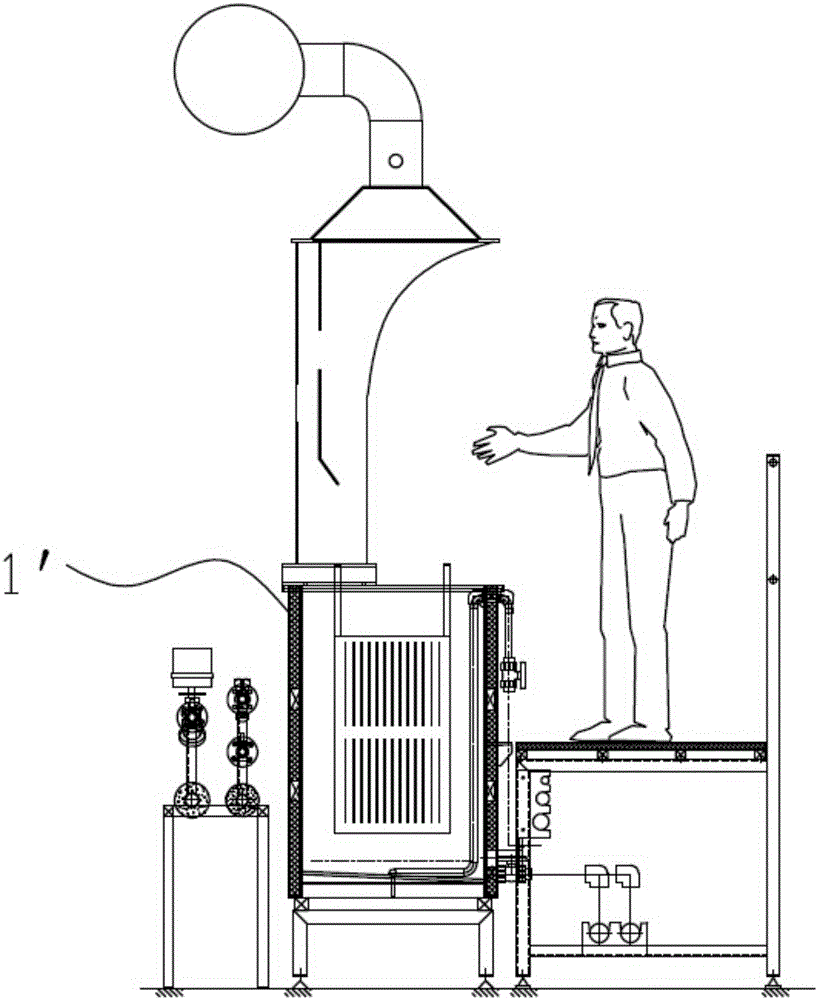
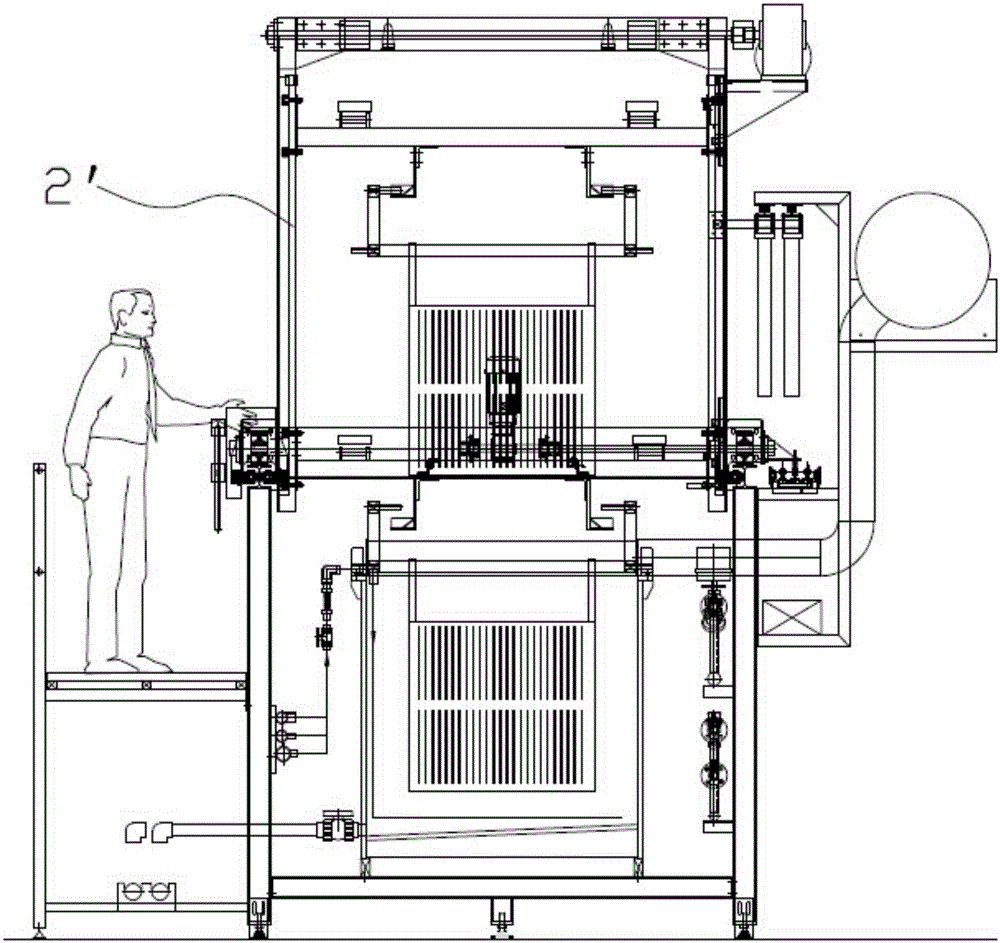
[0037] The invention uses robots to replace workers in manual equipment for handling, can complete various manual actions, solves the problem of worker fatigue and the physical injury caused by harsh environments to wo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More