

cherry picking robot end effector
A technology of end effectors and robots, which is applied in the direction of picking machines, agricultural machinery and tools, harvesters, etc., can solve the problems of cherry fruit damage, etc., and achieve the effect of improving fruit quality, labor productivity, and economic value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
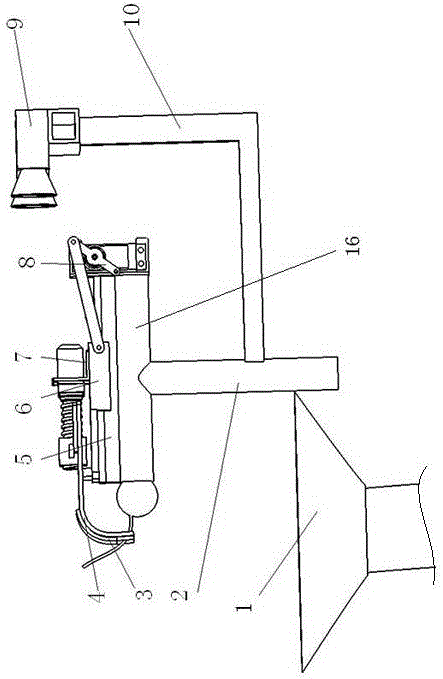
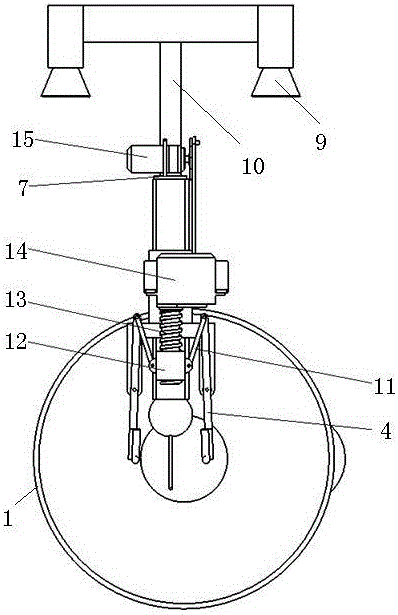
[0021] See attached Figure 1-2 , the cherry picking actuator disclosed in the present invention includes a fruit collector 1, an air guide cylinder bracket 2, a clamping rubber 3, a clamping front rod 4, a slide rail 5, a mobile platform 6, a mounting bracket 7, and a crank connecting rod Mechanism 8, camera 9, camera bracket 10, clamping hand rear lever 11, ball screw seat 12, ball screw 13, rotation stepping motor 14, translation stepping motor 15, air guiding cylinder 16.
[0022] The cherry picking robot end effector disclosed by the present invention includes a cherry fruit positioning mechanism, a cherry pose recognition mechanism, a clamping and picking mechanism, and a fruit collection mechanism.
[0023] The cherry fruit positioning mechanism is an air-suction positioning mechanism, including an air guiding cylinder and an air pump, the air g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More