

Robot profiling controller and control method thereof
A control method and robot technology, applied in manipulators, manufacturing tools, etc., can solve problems such as difficult operation, unfavorable popularity of robot products, and insufficient intuitive operation of remote sensing control handles.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0010] The present invention will be further described below in conjunction with the drawings.
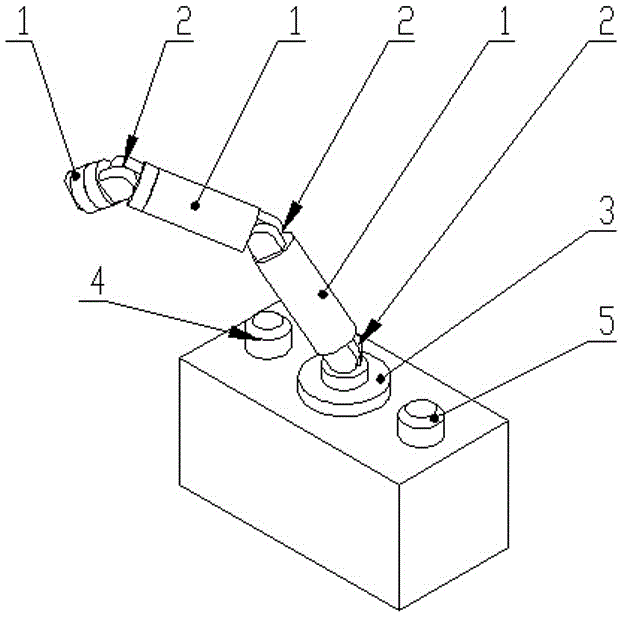
[0011] Such as figure 1 As shown, the present invention is a robot profiling controller, which includes a base on which is provided a robot terminal device control knob, a control gain knob, and a robot model; the robot model is composed of a simulated arm and a simulated joint, and simulates An angle sensor is installed in the joint.
[0012] A control method of a robot profiling controller is that an angle sensor is installed in the analog joint, and when the angle between the two analog arms of the analog joint and the twisting angle of the two analog arms change, the corresponding angle sensor The angle change information will be sent to the control system, and after processing by the control system, the corresponding operation instructions will be sent to the controlled robot, and finally the controlled robot will make the same action.
[0013] The size of the robot model is reduce...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More